未知の環境での自律走行
2021年03月15日
ホームページをご覧くださりありがとうございます。
4月から4年生になる湯浅です。
今回は素直に、自分がやっている研究について、軽く説明しようと思います。
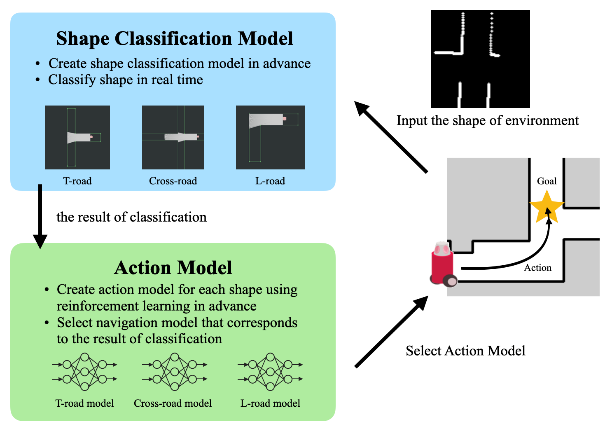
私の現在の研究は、「強化学習により獲得した行動モデルの自動切り替えによる未知の実環境での移動ロボットの自律走行」というテーマでやらせていただいています。簡単に説明すると、移動ロボットが、決まった場所だけではなく、未知の場所でも自律走行をできるようにするというものです。仕組みは、予め、基本形状(オープンスペース、一本道、十字路、T字路、L字路など)で移動ロボットが走れるように強化学習をします。そして、レーザーセンサーで、移動ロボットがどの基本形状にいるかを分類します。そして、予め学習しておいた行動モデルに従って、走行するというものになっています(下図)。
この研究は、先輩の研究を引き継いでやっています。だから、ロボットを自律させる前に、自分が自立しないといけないなと思います。コロナ禍で、さぼり癖がついてしまい、学会の原稿を提出してから、何一つ勉強をしていません。今回、ホームページ更新に指名していただいたので、この機会にまた、勉強を進めていこうと思います。コロナ禍に負けずに頑張っていきましょう。