北陽電機製レーザーセンサ「UTM-30LX-EW」の使い方
2021年06月15日
こんにちは。森岡研究室M1の猪口です。もうすぐ夏です。 今回は、真面目なお話です。森岡研究室では、センサ情報に基づくロボットの自律走行の研究を行っています。 ロボット走行におけるレーザーセンサとして「Lidar」というものを使っています。
Lidarとは? LiDAR(ライダー)とは、「light detection and ranging(光による検知と測距)」の頭文字をとった言葉で、レーザーライダーや赤外線ライダー、3Dライダーと呼ばれることもあります。
本研究室では、北陽電機製のレーザーセンサを使用しています。主に使用しているレーザーセンサは以下の二つです。 ・UTM-30LX(オレンジ) ・UTM-30LX-EW(青) センサーの上の部分がオレンジ色の UTM-30LXについてはUSB接続を行いシリアルポートの権限を許可するだけで使用できます。(簡単です)
しかし、 UTM-30LX-EWについてはイーサネットで接続するため、セットアップが多少面倒です。そこで、UTM-30LX-EWのセットアップの仕方をここに残しておきます。
(セットアップ手順)
① UTM-30LX-EWとPCをUSB接続します。この際、レーザーセンサからはLANケーブルが出ているので、LANからUSBに変換する変換器がいります。(※研究室に多分あります)
② UTM-30LX-EWには初期IPアドレスとして「192.168.0.10」が設定されています。なので、PCとレーザーセンサを同一のネットワークにしてあげる必要があります。
1.「設定」→「ネットワーク」からPCのIPアドレスを変更します。「ネットワーク」を開くと以下の画面が出ます。
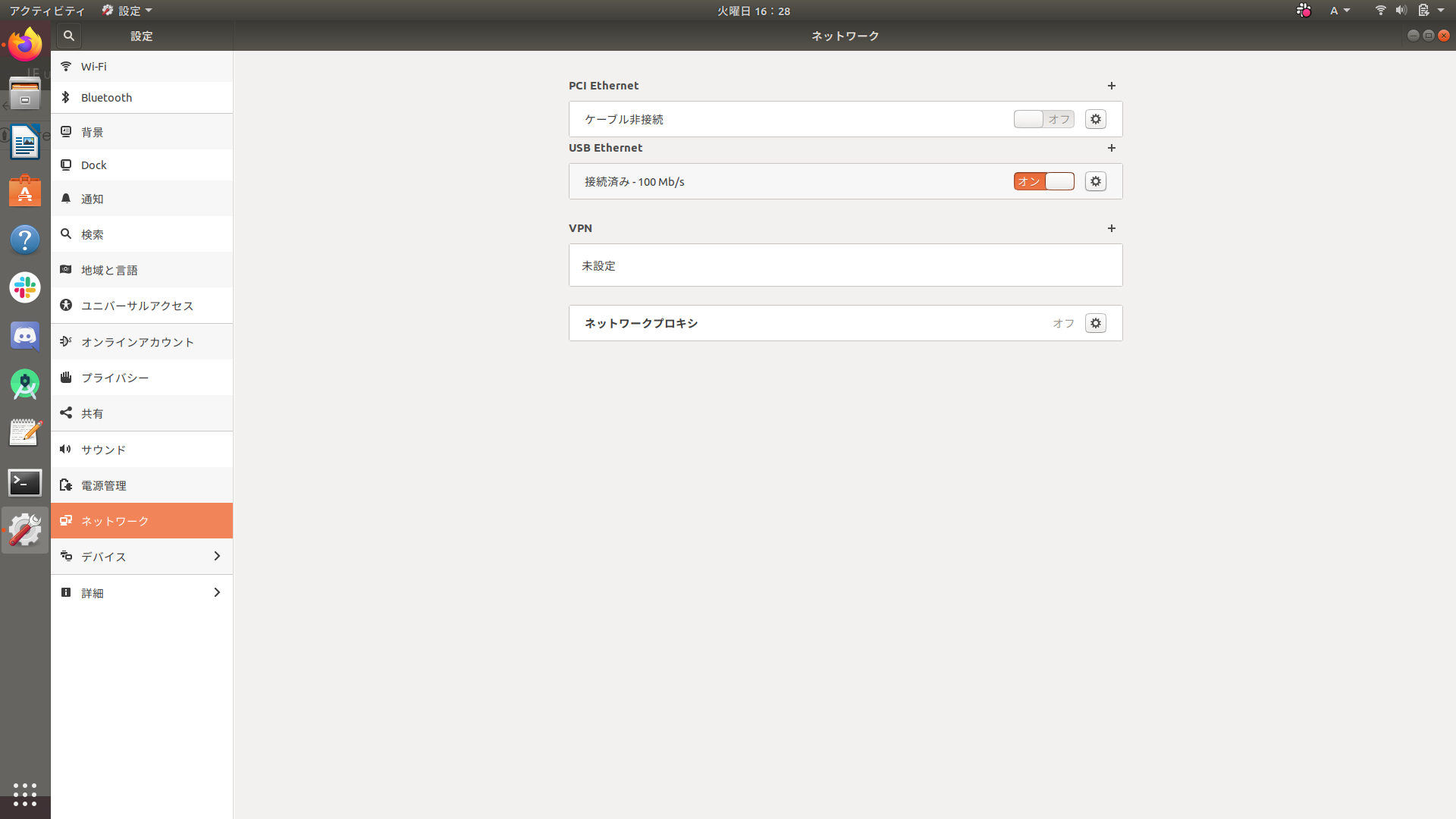
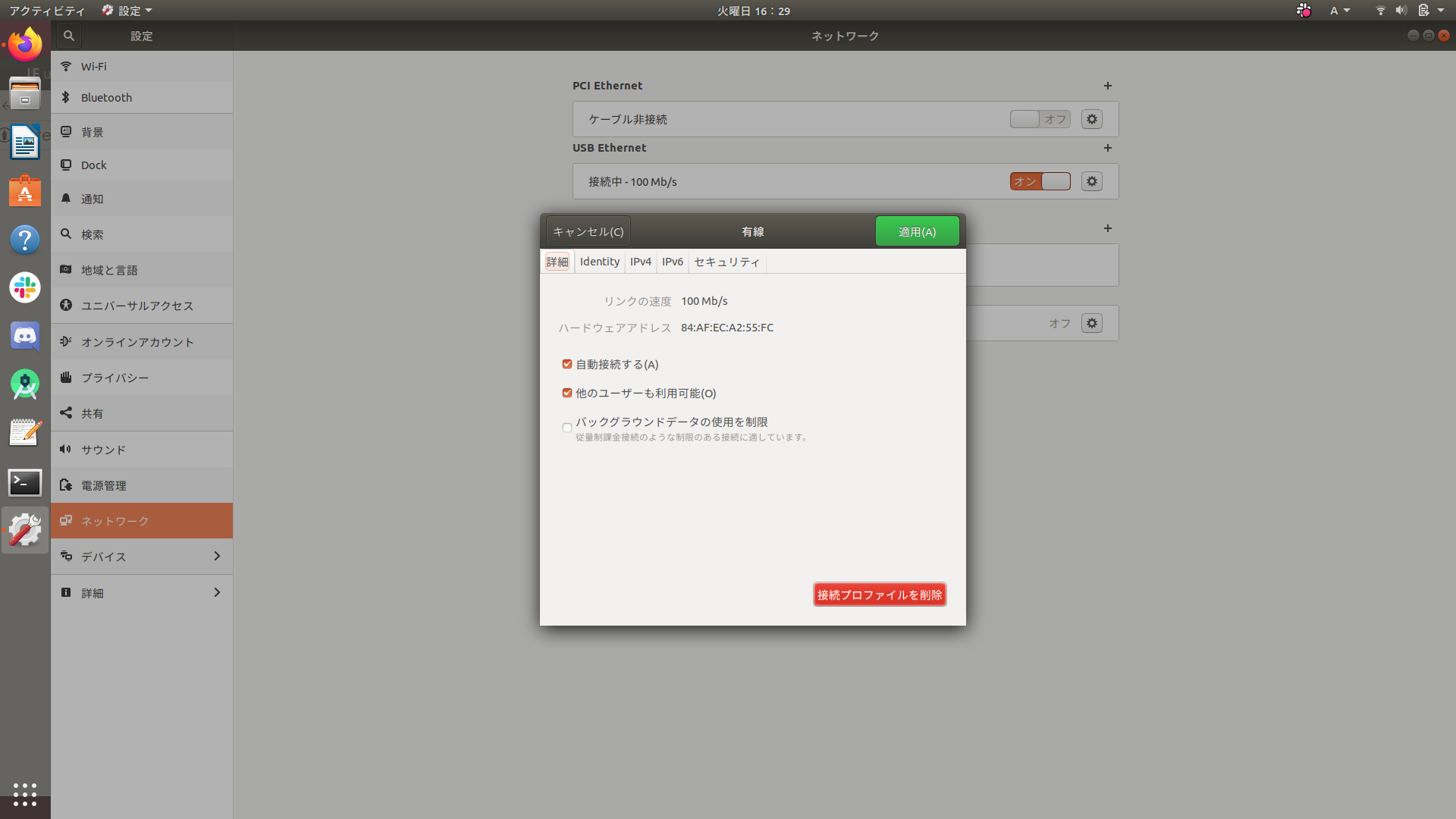
2.USB Ethernetの右側の歯車マークをクリックすると以下の画面が出ます。
 3.IPv4内のIPv4 メソッドの手動を選択。
3.IPv4内のIPv4 メソッドの手動を選択。
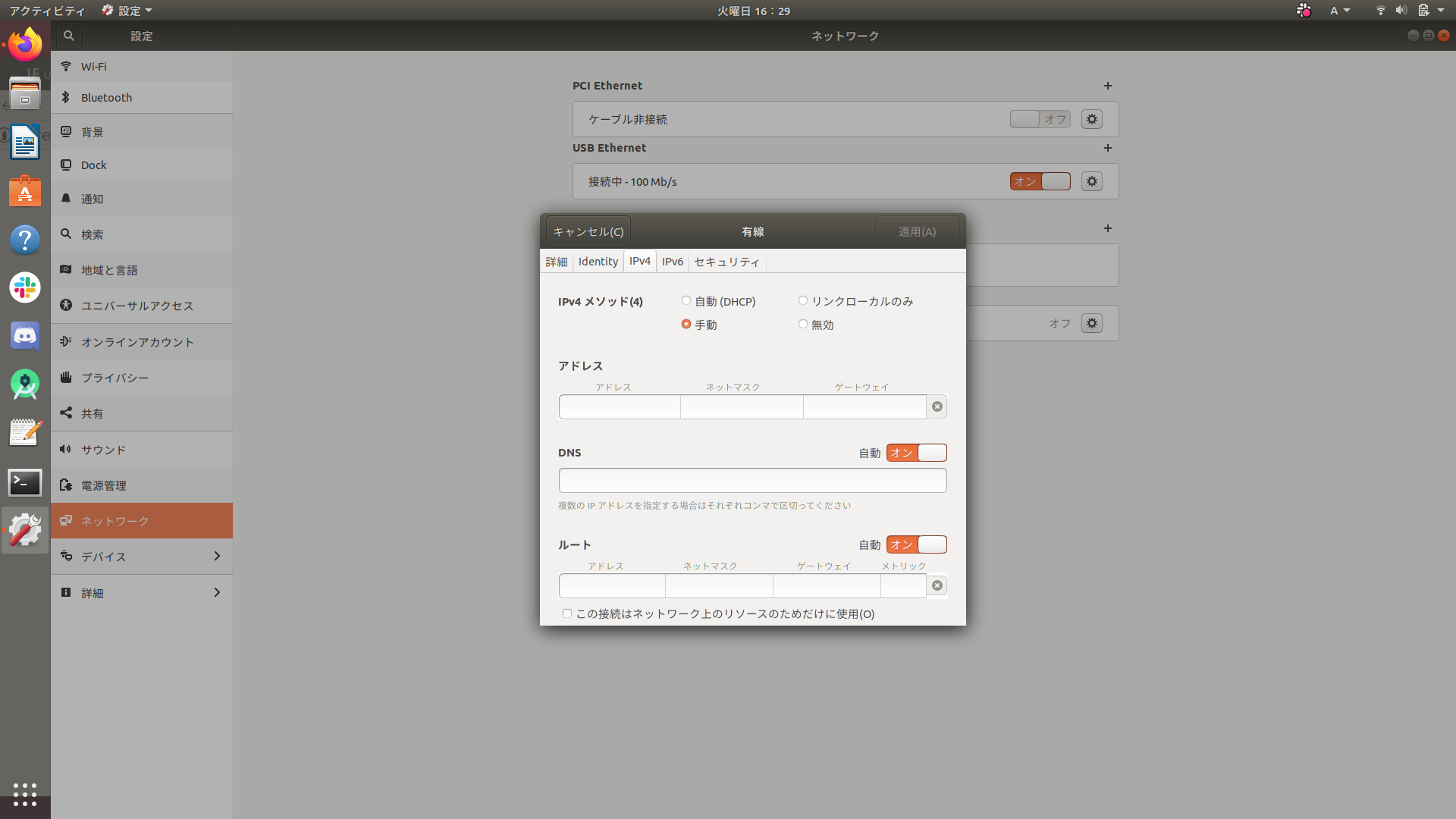 各項目を以下のように設定します。(以下のIPアドレスは一例です)ただし、PCとレーザーセンサを同一ネットワークにする必要があるので「192.168.0.x」にします。
アドレス:「192.168.0.5」
ネットマスク:「255.255.255.0」
ゲートウェイ:「192.168.0.1」
DNS:「192.168.0.1」
注意点:IPv4のアドレスには、他の端末等に設定されていないものを使いましょう。詳しくは検索してください。
各項目を以下のように設定します。(以下のIPアドレスは一例です)ただし、PCとレーザーセンサを同一ネットワークにする必要があるので「192.168.0.x」にします。
アドレス:「192.168.0.5」
ネットマスク:「255.255.255.0」
ゲートウェイ:「192.168.0.1」
DNS:「192.168.0.1」
注意点:IPv4のアドレスには、他の端末等に設定されていないものを使いましょう。詳しくは検索してください。
「適用」をクリック
IPアドレスの設定が終わったら、一度USB Ethernetの接続をオフにして、再接続します。再接続することで変更したネットワーク設定が有効になります。 4.ターミナルにて
ping 192.168.0.10
と入力し、以下のようなログが流れれば成功です。
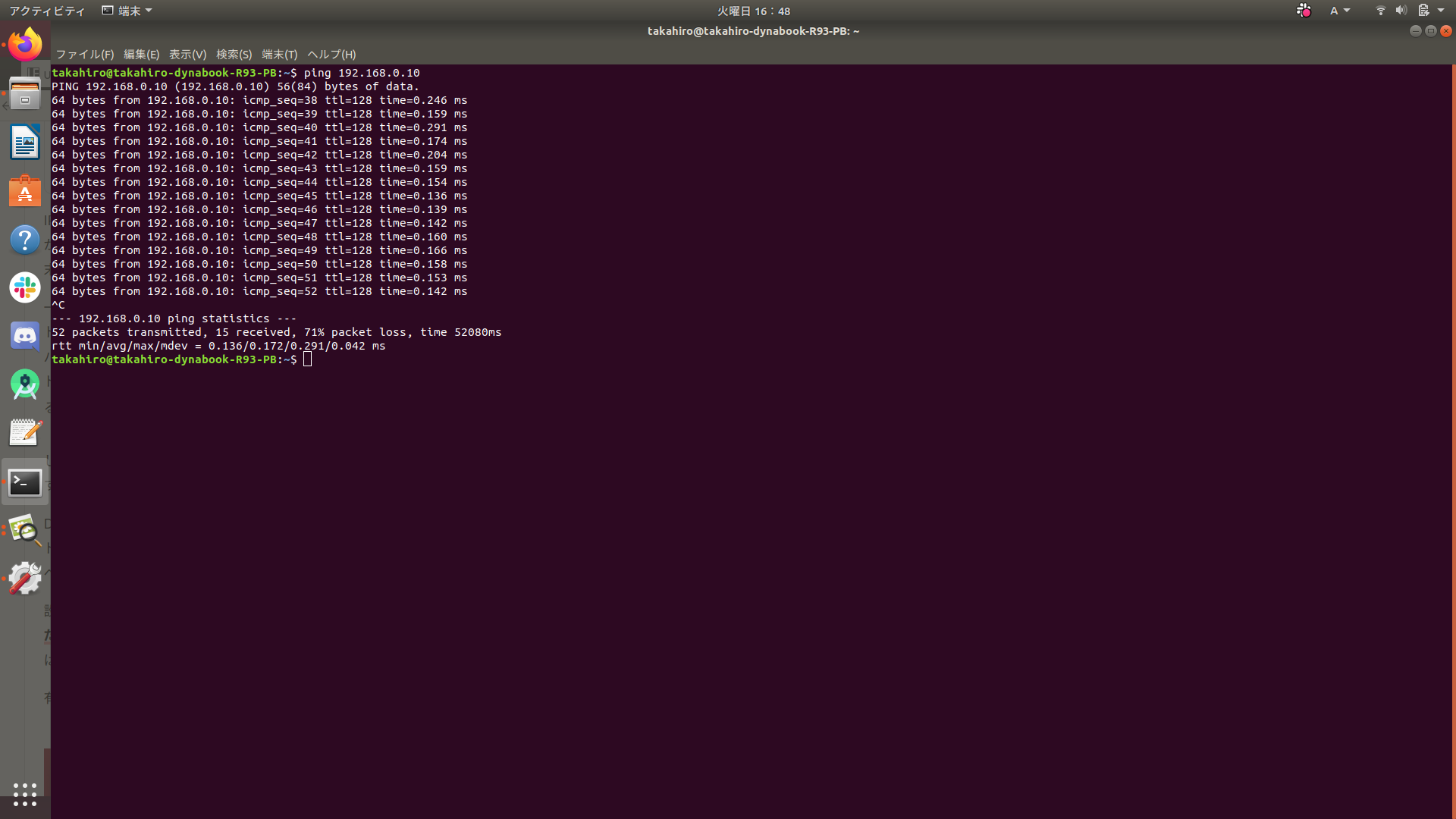
以上がIPアドレスの設定手順です。
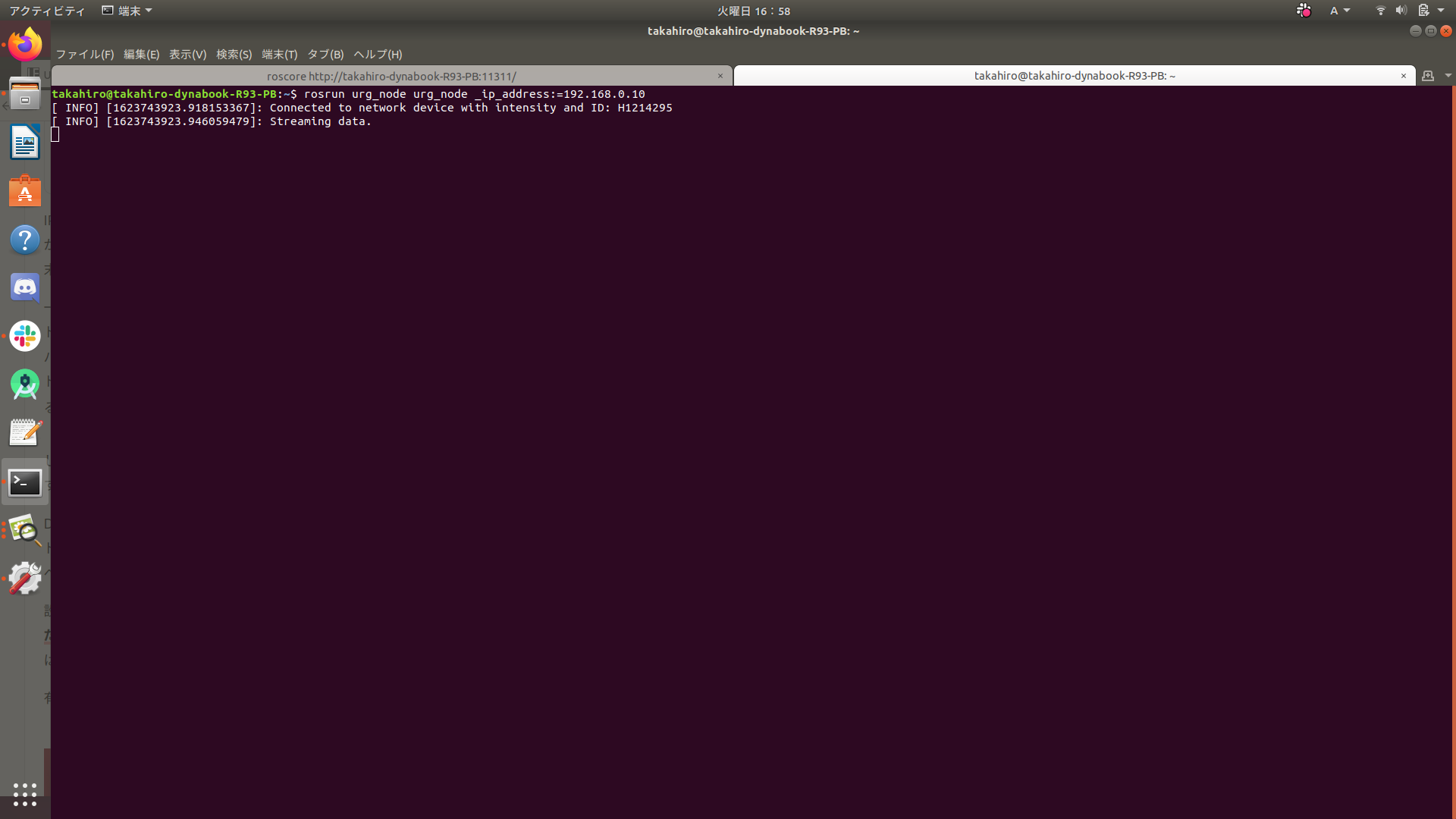
では、実際にレーザーセンサが作動しているか確認します。ターミナルで以下を実行します。
roscore rosrun urg_node urg_node _ip_address:="192.168.0.10"
こんな感じになれば成功です。
rostopic echo /scan
を実行するとレーザーセンサの値を観測できます。
以上が北陽電機製レーザーセンサ「UTM-30LX-EW」のセットアップと動作確認の手順です。
ありがとうございました!!!!!!!!!!