rtklibによる緯度経度情報の取得方法
2021年07月29日
M2の古谷です。
今回はrtklibによる緯度経度情報の取得の方法を紹介します。 本記事ではレシーバーとして,u-bloxのZED-F9Pを実装した受信機および多周波RTKアンテナであるJCE228Eを使用してます。 まずはアンテナと受信機を位置情報の取得をするPCに接続します。PCをネットワークに接続します。
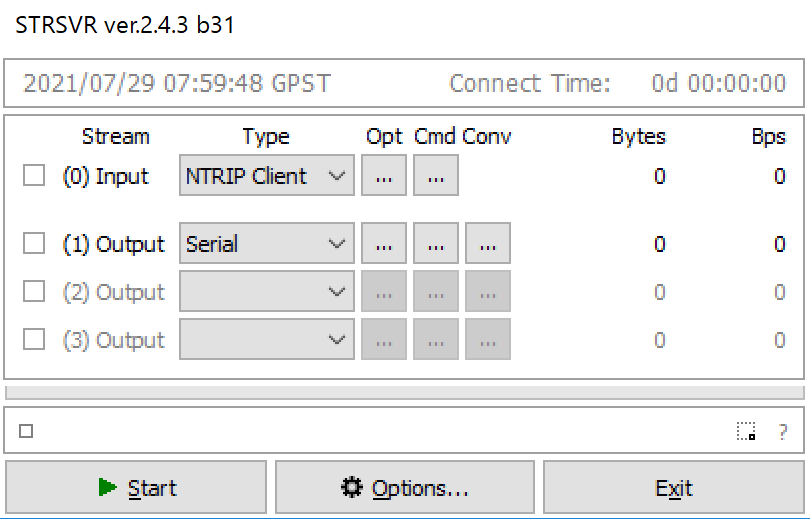
[Windowsの場合] https://github.com/tomojitakasu/RTKLIB_bin/tree/rtklib_2.4.3 1.必要なパッケージをダウンロードします。ここで2.4.3のバージョンであることを確認してください。 2.その中のstrsvr.exeを開いて設定を行います。InputにNTRIP Client選択します。Optionを近隣の基地局に合わせて設定します。基地局はhttps://rtk.silentsystem.jp を参考にしてください。OutputにSerialを選択してPortをレシーバーの接続しているPort番号にします。Output Received Stream to TCP Portにチェックを入れ、適当な数字を設定します。 3.以上の設定が完了したらStartをクリックすると位置情報の取得が開始されます。エラーが特になくFixしていれば緑の色が表示されます。 4.次にrtkplot.exeを開きます。FileのConnection SettingsでTCP Clientを選択します。OptionでServer Addressをlocalhost,Portを先ほど設定した適当な数字にします。その後FileのConnectをクリックすると取得した位置情報をプロットし始めます。
[ROSの場合] https://qiita.com/k-koh/items/8fd8ef6310e4f40fa536 上記の記事に沿って設定を行なってください。/ublox/fixというトピックとして緯度経度情報を取得することができます。
私は上記の方法を用いてロボットの自己位置推定を行なっています。[ROSの場合]はロボットの制御と位置情報の取得が同時にできるのでおすすめです。