環境に応じた自己位置推定の切り替え
2022年02月28日
まもなく卒業するM2の古谷です。 今回は修士論文で執筆した移動ロボットの環境に応じた自己位置推定の切り替え手法について説明します。
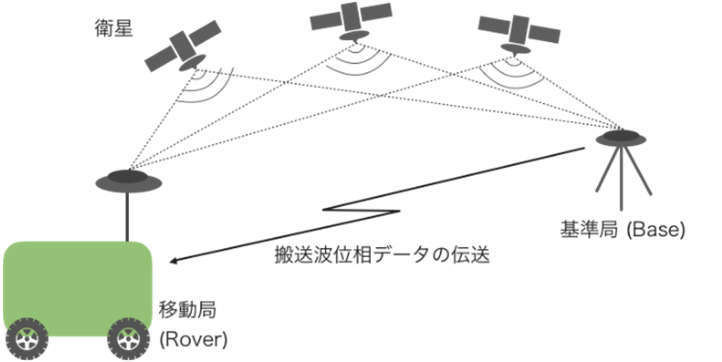
本手法で扱う位置情報の取得方法は主にRTK-GNSSになります。
RTK-GNSSはみなさんが普段スマホなどで使用するGPSより高精度の技術です。
 [メリット]
・屋外において高精度な位置情報の取得が可能
・基準点を定める必要がない
[デメリット]
・屋内などの環境では精度が低下しやすい
・位置情報が大幅にずれることがある
[メリット]
・屋外において高精度な位置情報の取得が可能
・基準点を定める必要がない
[デメリット]
・屋内などの環境では精度が低下しやすい
・位置情報が大幅にずれることがある
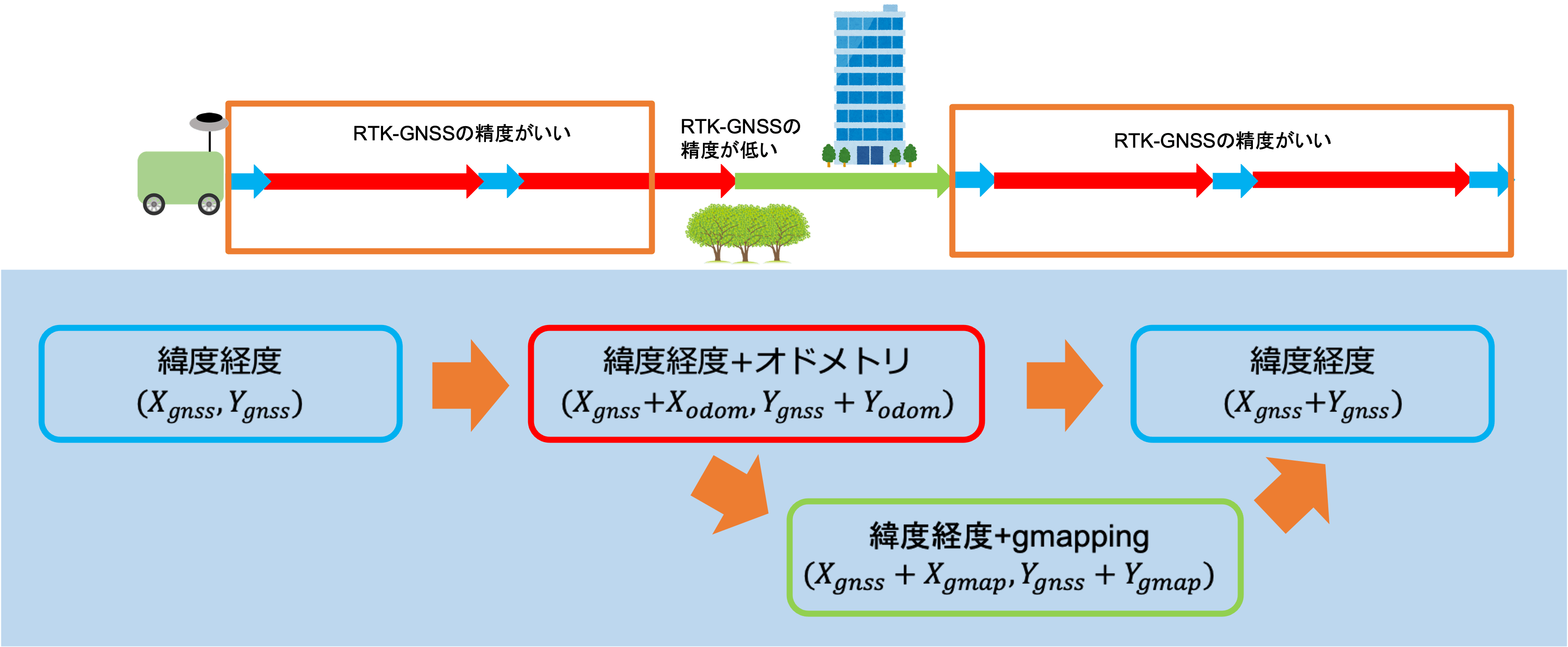
RTK-GNSSでは上記の通り屋内などの環境では不安定な自己位置推定になることがある。 そのために環境に応じた自己位置推定の切り替えとRTK-GNSSに依存しすぎない自己位置推定の手法を実装しました。
まずはRTK-GNSSに依存しすぎない自己位置推定の手法について説明します。
RTK-GNSSによる自己位置推定を長い時間に行う程に大幅な位置情報のズレのリスクが高まります。
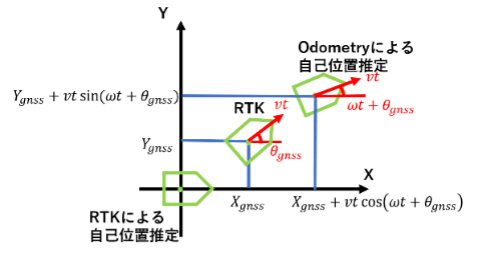
この問題を改善するためにRTK-GNSSによる自己位置推定をの後、しばらくオドメトリによる位置情報の補完を行います。
その後定期的に精度が高いRTK-GNSSにより自己位置推定を行い、この作業を繰り返します。
オドメトリとは簡単に説明すると、エンコーダで車輪の回転により取得した移動ロボットの並進速度と角速度データを使用してロボットの位置と姿勢を推定する手法のことです。
切り替えの方法は最後に更新したRTK-GNSSの座標にオドメトリにより得た座標を足し合わせます。
次に環境に応じた自己位置推定の切り替えについて説明します。
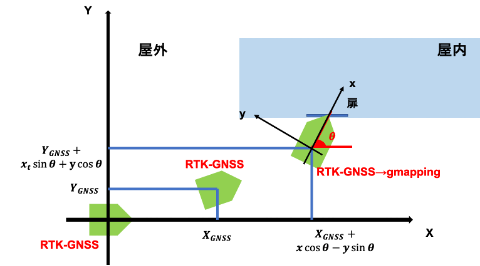
RTK-GNSSは屋内での精度が低下するため屋内などの環境ではgmappingによる位置情報の補完を行います。
gmappingとはマップを作成するパッケージとなっており、センサーから取得した情報から環境の形状を作成します。
走行中にgmappingを起動しておくことで周辺の形状変化を読み取り、位置情報を取得することができます。
また屋外に出た場合は再びRTK-GNSSに依存しすぎない自己位置推定の手法を行います。
切り替えの方法は最後に更新したRTK-GNSSの座標にgmappingにより得た座標を足し合わせます。
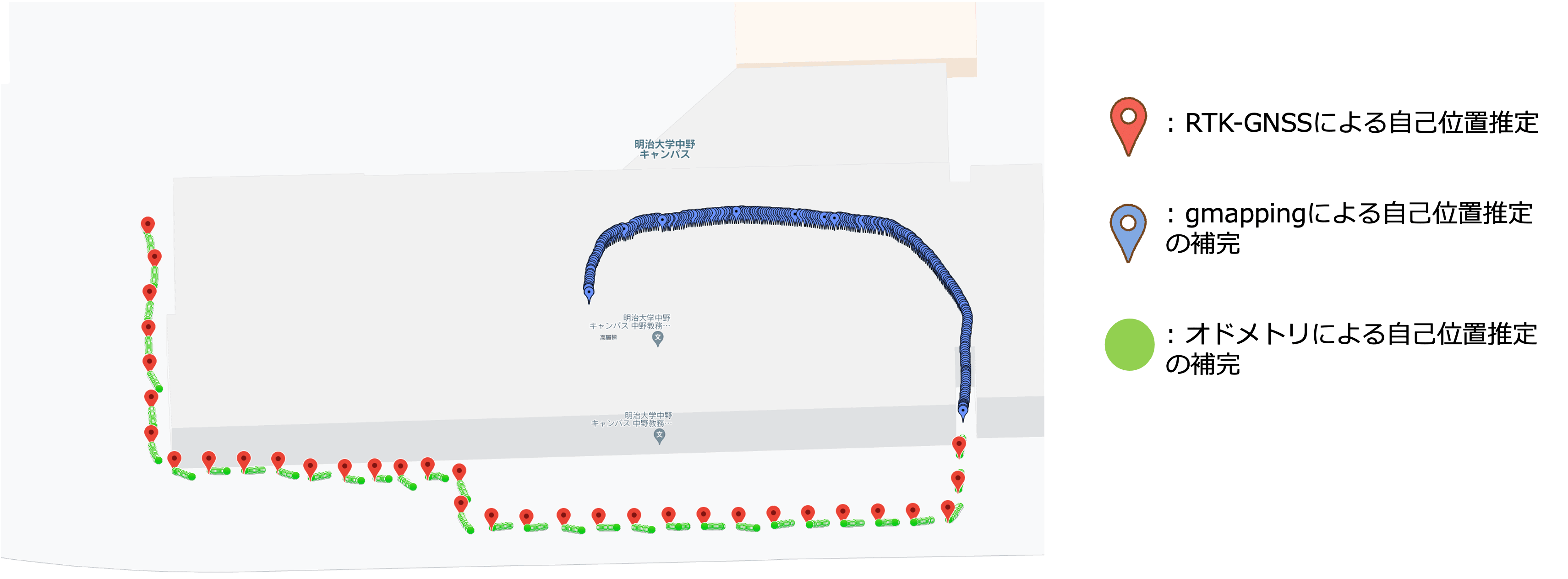
これらの手法を用いて実験を行いました。
環境は明治大学の中野キャンパス1階と屋外でロボットの操作は手動で行いました。
以下の実験結果の通りそれぞれの切り替えに成功していることがわかるかと思います。
今後の展望としてはあらゆる環境を走行し、本手法の妥当性の評価を行いたいと考えています。 私はまもなく卒業するため今後の展望は研究室の後輩に託したいと思います。 ここまで読んでいただきありがとうございました。