MoveItを使ってロボットアームのモデルを動かしてみた
2022年03月02日
4月から新B4になる小川です。
今回はMoveItというライブラリを使ってロボットアームのモデルをGazeboというシミュレータの中で動かした話をします。
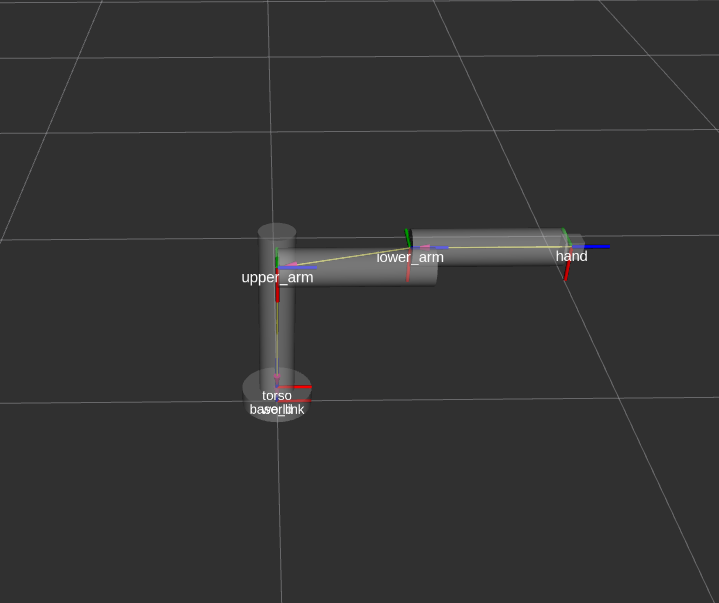
ロボットアームのモデルは台座,胴体,上腕,前腕,手という5つのリンクと腰,肩,肘,手首という4つの関節からなるものです。
MoveItを使わない場合、ロボットアームの各関節に曲げる角度を送って動かしていましたが、MoveItを使うとゴール姿勢を決めて経路計画を立ててロボットアームを動かすことができます。
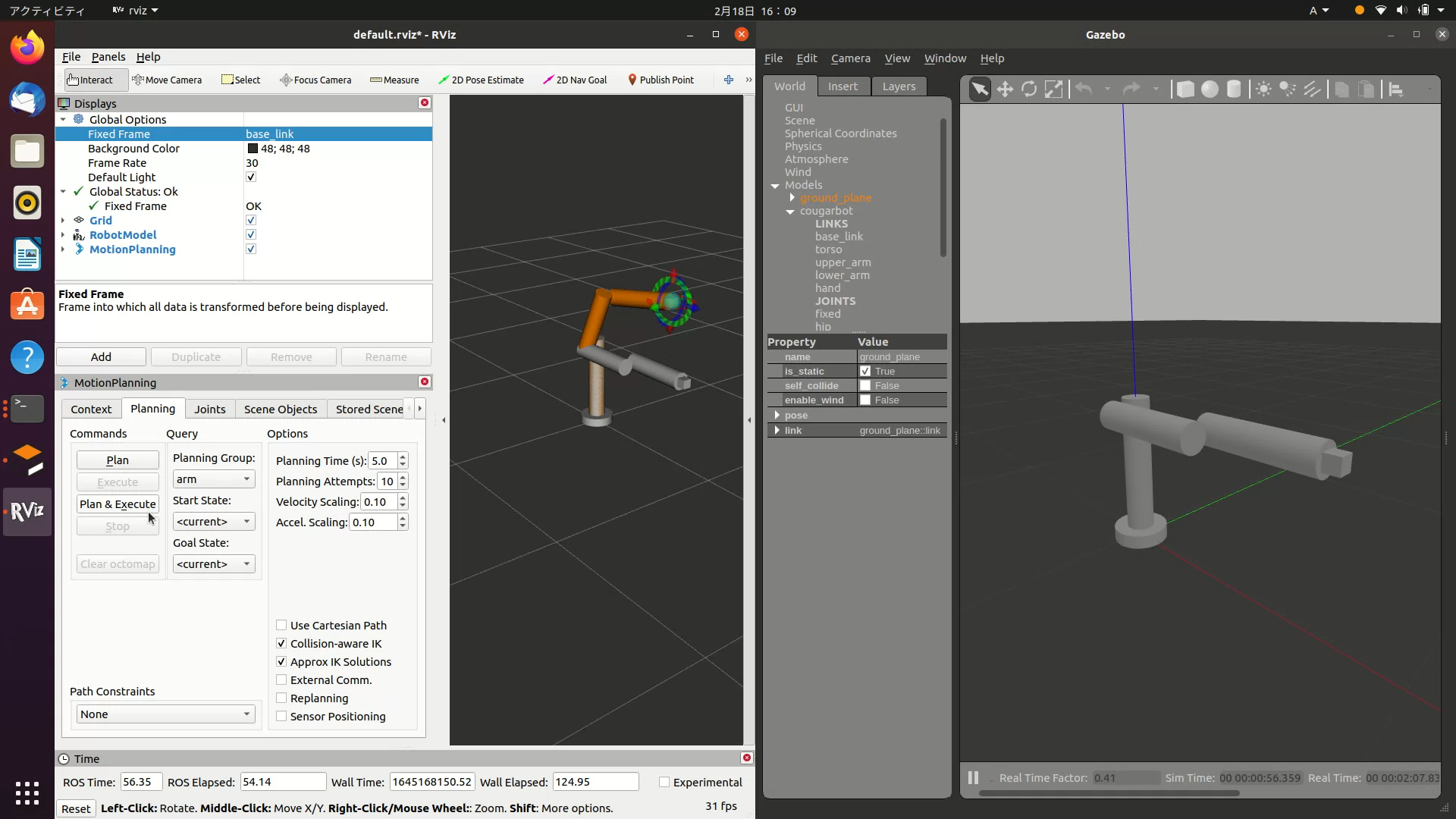
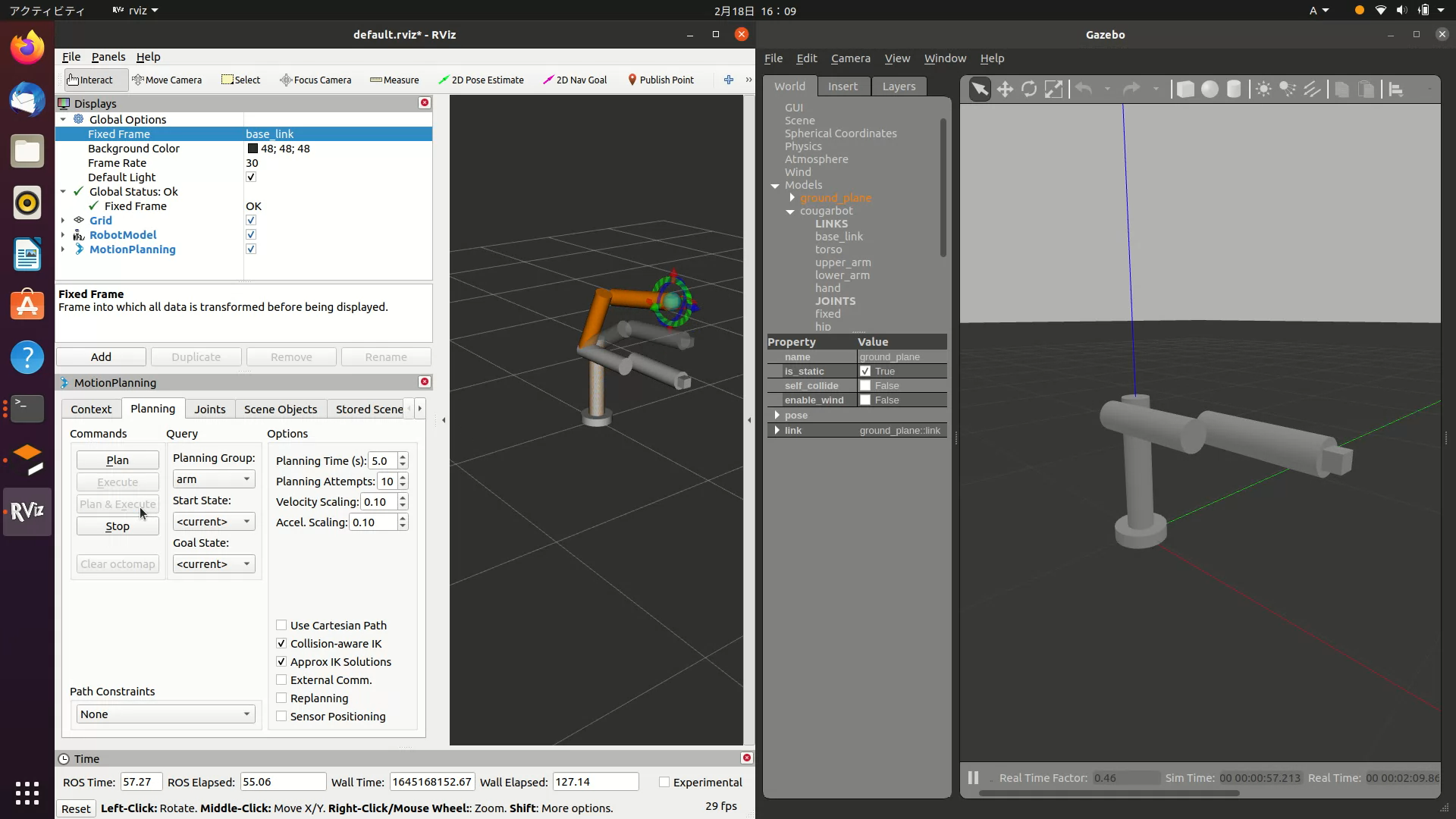
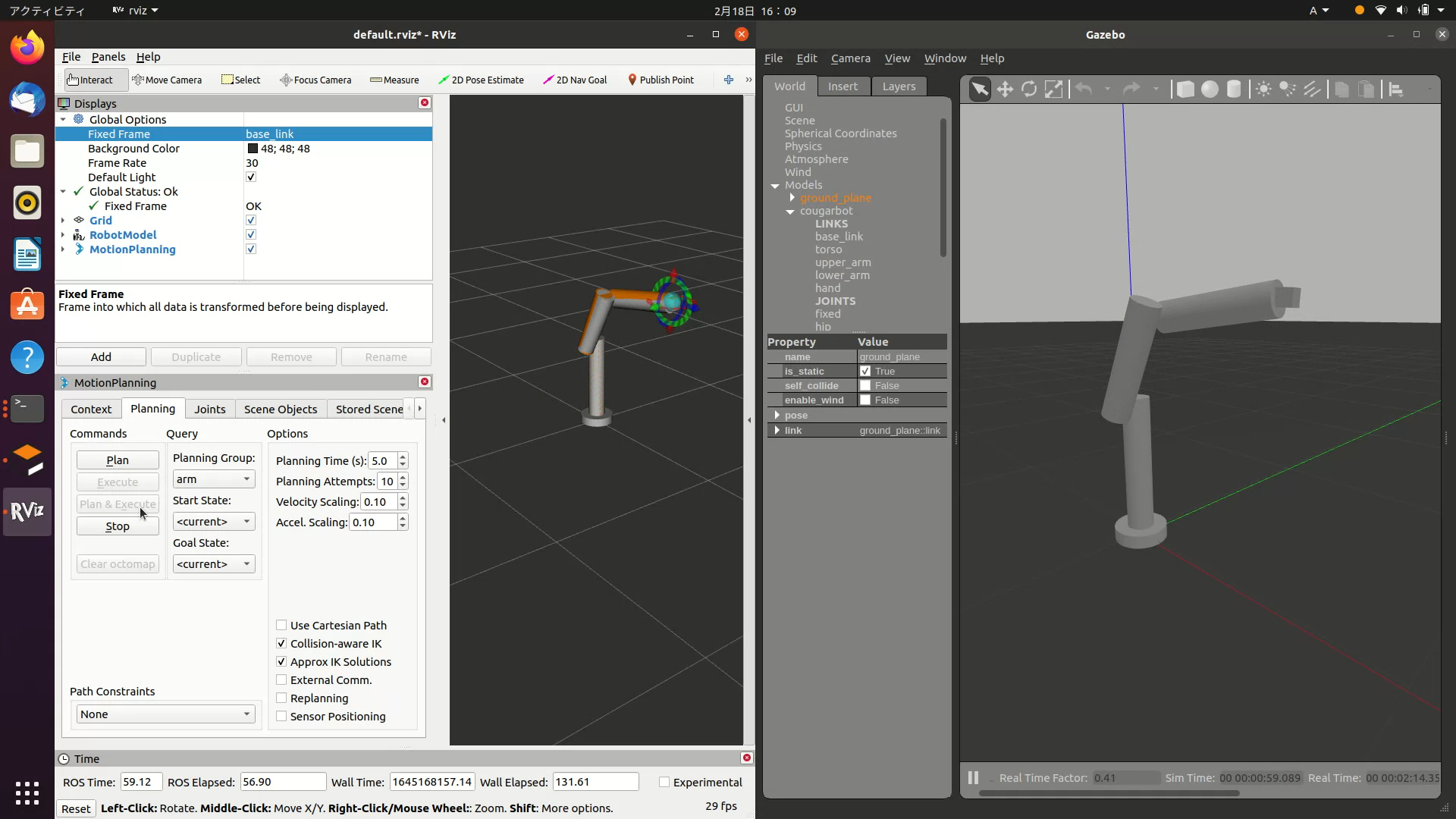
以下の画像は、左画面でゴール姿勢を決めて経路計画を立て、右画面のシミュレータ(Gazebo)の中で経路計画の通りに動いているときのものです。
 MoveItの設定はSetup Assistantのおかげで、簡単に済ませることが出来ました。
また、今回はEnd Effectorsを手に設定しているので、ゴール姿勢を決める際もロボットアームの手の位置を操作しました。アームによっては、End Effectorsに設定するものも異なり、ゴール姿勢を決める際に操作するものも変わります。
以前の記事で紹介されていましたが、ロボットアームの実機を導入してもらいました!
今後はそちらを動かしたりしながらロボットアームについての知見を深め、卒業研究を行っていきたいと考えています。
ここまで読んでいただきありがとうございました。
MoveItの設定はSetup Assistantのおかげで、簡単に済ませることが出来ました。
また、今回はEnd Effectorsを手に設定しているので、ゴール姿勢を決める際もロボットアームの手の位置を操作しました。アームによっては、End Effectorsに設定するものも異なり、ゴール姿勢を決める際に操作するものも変わります。
以前の記事で紹介されていましたが、ロボットアームの実機を導入してもらいました!
今後はそちらを動かしたりしながらロボットアームについての知見を深め、卒業研究を行っていきたいと考えています。
ここまで読んでいただきありがとうございました。