北海道で学会発表をしてきました
2022年06月13日

M1の鶴田です。
6月のはじめに、北海道の札幌でROBOMECHの学会があり、ポスター発表をしてきました。初めての学会です。
6月の札幌は少し肌寒いくらいの、過ごしやすい気温でした。
僕が発表した研究テーマは、「深層強化学習による単眼カメラ画像を入力とした移動ロボットの自律走行モデルの獲得」です。
簡単に言えば、移動ロボットがカメラ画像を頼りに目的地まで走行できるような行動を学習するという研究です。
Unityをシミュレーション環境として利用し、大学の廊下を模した環境で学習、走行する行動モデルの作成をしました。
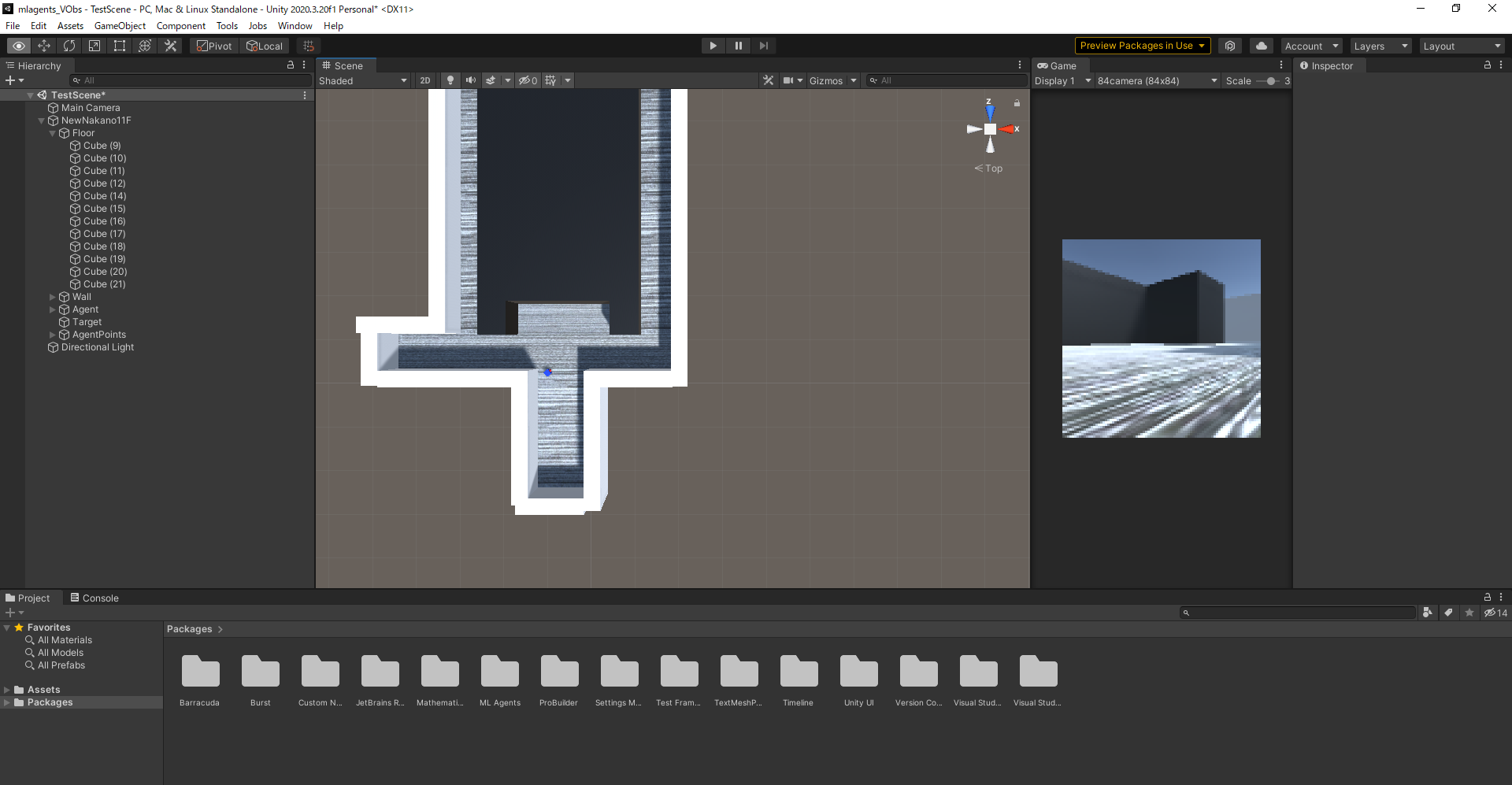 近い目的地であれば、そこまで到達する行動の獲得はできましたが、まだ課題は多く残っています。
学会では、「ほかの環境を走行できるのか?」という質問をいただきましたが、現状、学習した環境でしか走行できない行動モデルになっています。
これは、他環境では取得できるカメラ画像の画素値が学習したものと大きく異なるためです。
多様な環境で走行できるような行動モデルをどう作るのか、というのが大きな課題の一つです。
近い目的地であれば、そこまで到達する行動の獲得はできましたが、まだ課題は多く残っています。
学会では、「ほかの環境を走行できるのか?」という質問をいただきましたが、現状、学習した環境でしか走行できない行動モデルになっています。
これは、他環境では取得できるカメラ画像の画素値が学習したものと大きく異なるためです。
多様な環境で走行できるような行動モデルをどう作るのか、というのが大きな課題の一つです。