人間の歩行に追従する移動ロボット
2022年09月09日

こんにちは。M2の塚谷です。 今回は僕の研究に関して話したいと思います。
僕は深層強化学習を使用して移動ロボットが一人の人間の後ろを追従する行動モデルを獲得する研究をしております。 強化学習は現実の環境を模擬したシミュレータ環境を用いて行います。
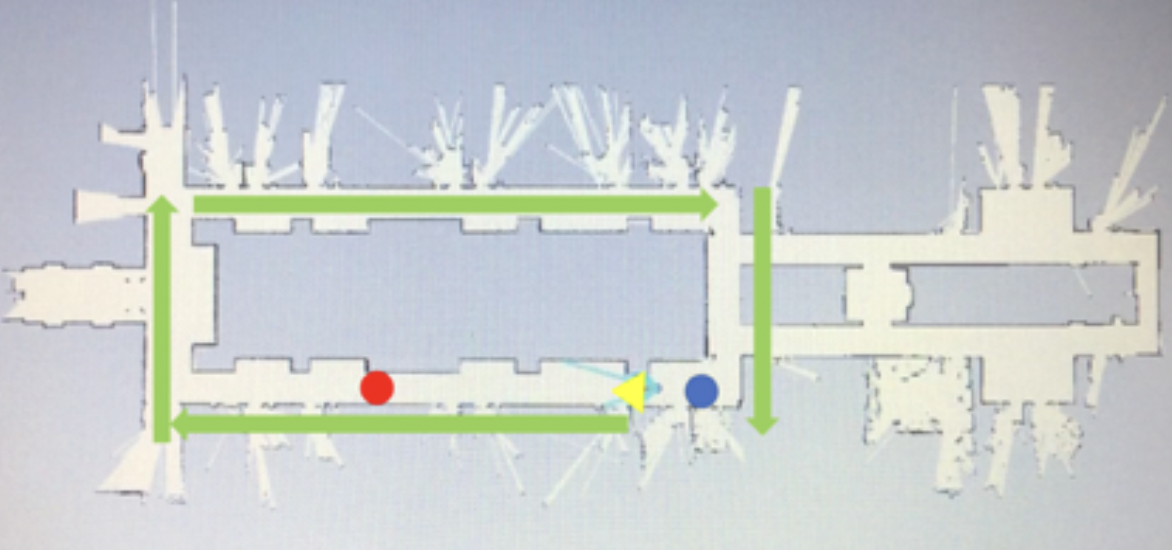
青丸の位置から赤丸に向かって移動ロボットが走行します。 その間黄三角の人間を追い越さないようにロボットが走行するようロボットを学習させます。
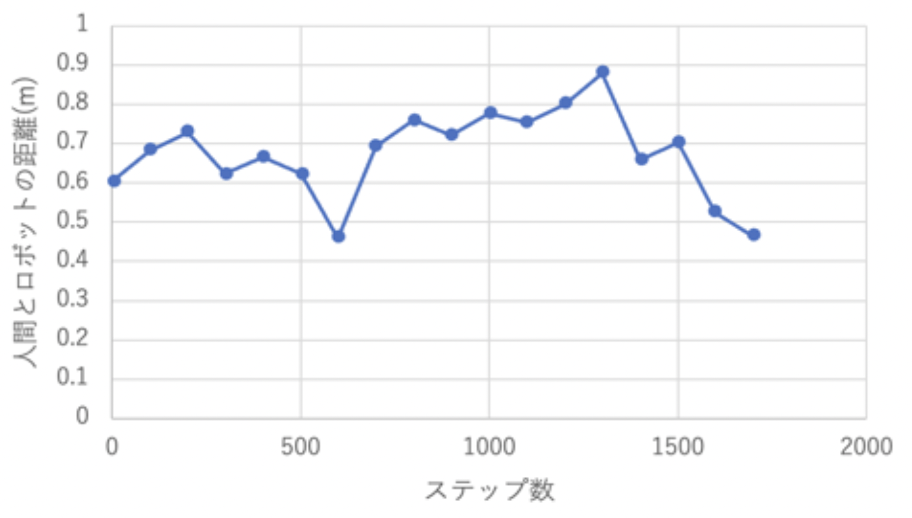
結果図のようにロボットが人間の後ろを一定距離保ちながら走行させることに成功しました。
さらにこの学習データを用いて実機で走行させたところ、 ロボットが人間に近づいたらロボットが速度を落とし、追い越さないように調整している様子が確認できました。