三次元都市環境自動生成
2022年10月17日
M2海保です。今回は最近の研究成果を共有します。ずばり、三次元都市環境自動生成です。 文章だと伝わりにくい研究でもあるため、さっそく画像を用いた説明に入ろうかと思います。
手順
- UnityのツールであるTesseraを用いて、Unity上に三次元都市環境を構築するのに用いるタイルを用意します。
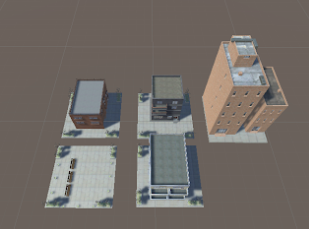
- これらタイルを適切に組み合わせることで、三次元都市環境を構築します。
結果
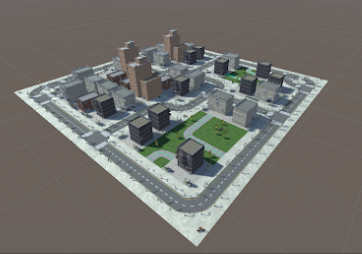
ご覧の通り、三次元都市環境が再現できています。
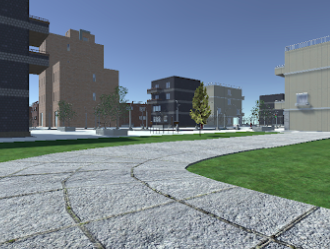
上空から見ると、少し拙い都市環境に感じるかもしれませんが、ロボット視点(一人称視点)だと立派な環境に見えるかと思います。
これら環境はボタンひとつで簡単に再現でき、類似環境も大量に再現できます。よって、今後の研究において役に立つ場面は多いと考えています。
今後はこれら環境において行動学習した移動ロボットを実環境にて走行させる予定です。