環境に適した行動モデルに切り替えて走行する移動ロボットの自律走行システム
2022年12月20日
森岡研究室M1の湯浅です。
現在取り組んでいる研究を簡単に紹介します。
私は、多様な環境で走行可能な移動ロボットの自律走行システムの開発を目的に、強化学習を用いた自律走行システムの研究を行っています。まず、Unityで作成したシミュレータ環境において移動ロボットが目的地に到達できるように強化学習をします(図1)。
 そして、図2のような多様な環境を作成してそれぞれの環境で行動学習を行い、それぞれの行動モデルを作成します。
そして、図2のような多様な環境を作成してそれぞれの環境で行動学習を行い、それぞれの行動モデルを作成します。
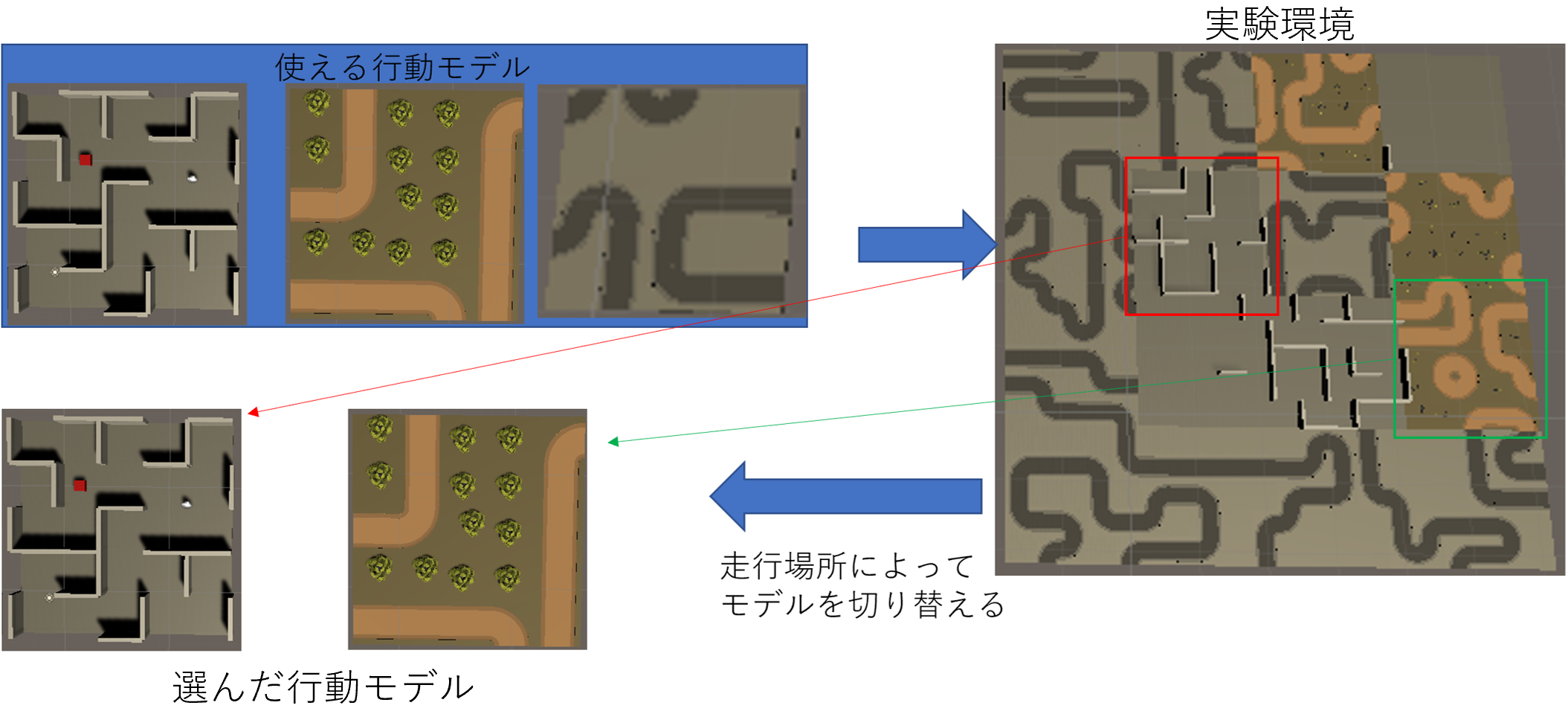
 そして、実際に走行するときに図3のように環境に応じた行動モデルに切り替えて走行するようなシステムの開発を行っています。
まだ課題がいっぱいあるので実験結果とかはないです。うまく走れるといいなぁ。。。
そして、実際に走行するときに図3のように環境に応じた行動モデルに切り替えて走行するようなシステムの開発を行っています。
まだ課題がいっぱいあるので実験結果とかはないです。うまく走れるといいなぁ。。。