[研究紹介]3次元センサーを用いた自律移動ロボット
2019年07月18日
こんにちは、4年の鈴木です。
私は”3次元センサーを用いた自律移動ロボット”について研究しています。この記事では、基礎技術である環境地図生成と自己位置推定について簡単に紹介したいと思います。森岡研で3次元センサを用いた自律移動ロボットの研究は私が初めてで、未熟なところも多々あると思いますが、その辺は大目に見てください!
3次元環境地図生成
インプットデータとして動画1の3次元情報を用います。一般的には、3次元情報+オドメトリをインプットデータにすべきなのですが、今回はとりあえず環境地図作ってみようってことで、3次元情報のみで生成します。
動画1. input Data
地図生成プログラムを起動し、パラメータをいじると図2、図3のような3次元環境地図が生成できました!
少し傾斜が気になるのですが、ほぼ正確に生成されていると思います。
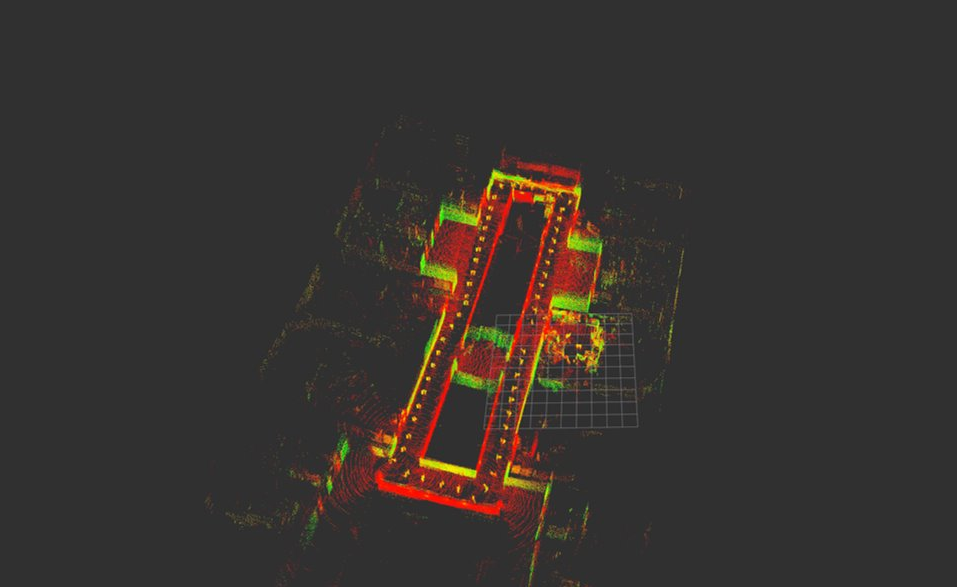
図2. 生成した3次元環境地図
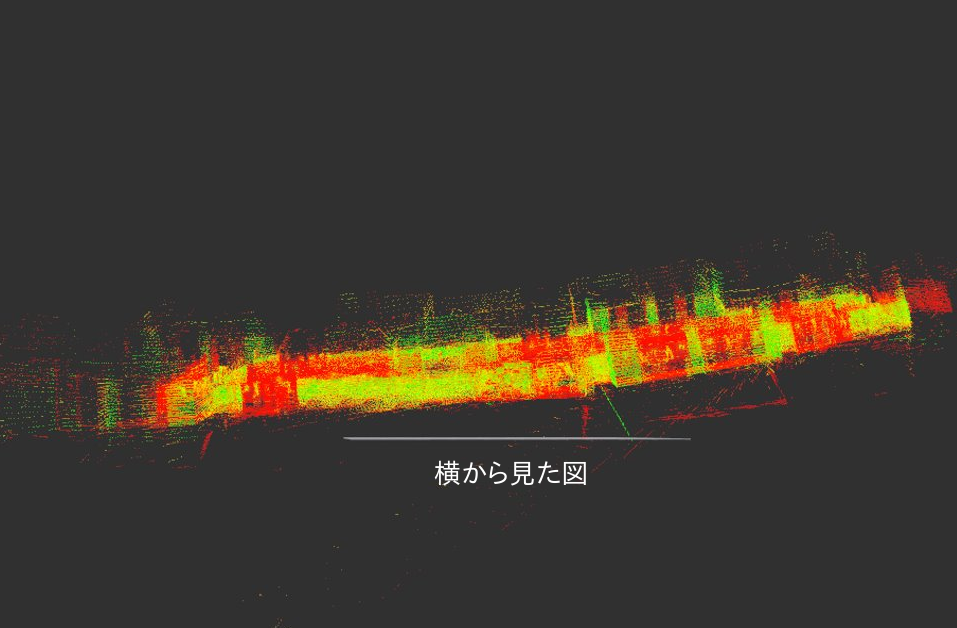
図3. 横からの図
自己位置推定
まとめ
少し問題も残っていますが、環境地図と自己位置推定ができていてよかったです。
2次元センサを使った時よりも、視覚的にインパクトがあって面白かったです。
最後まで読んで頂きありがとうございました。