[研究紹介]スマートフォンを持った人間を追従する移動ロボットシステム
2019年08月06日
こんにちは、M2の大竹です。
私は「スマートフォンユーザーのための人間追従移動ロボットシステムの開発」というテーマで研究をしています。
森岡研究室では、移動ロボットを主として研究している人が多くいて、下のようなタイヤで動くロボットを動かしています。

私はこのようなロボットたちが、私たちの身近な生活の中で活躍するような世の中になったらいいなーと思い、スマートフォンを活用することで簡易にロボットが人を追従して、サポートしてくれるようなシステムの開発を目指しています。
スマートフォンを使って、どのように追従を実現するかというと、1つはWi-Fiを使って人の大まかな位置を検出します。 人の位置を検出するときは、GPSを使うのが最もメジャーな方法で、皆さんも普段から使っていると思います。 ただ、GPSは屋内だと計測が難しく、細かな位置を取ることができません。
そこで、私の研究ではWi-Fiを使い、屋内でもある程度の精度で位置を検出できるシステムを開発しています。
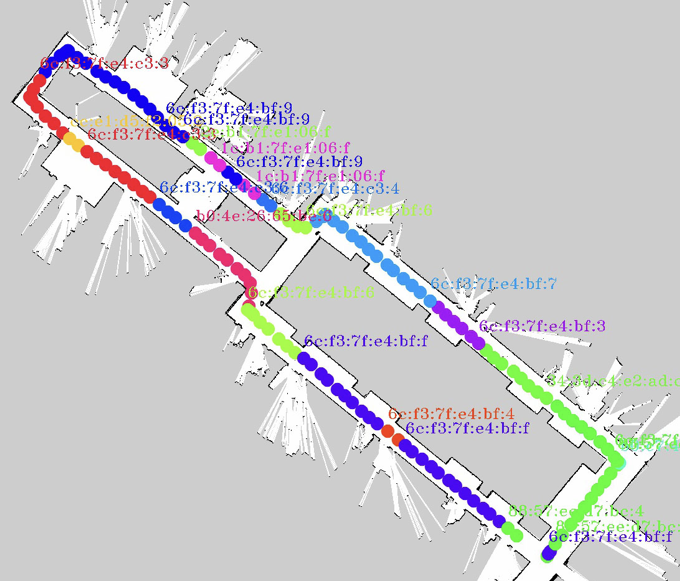
まず事前に、追従を行わせたい場所でロボットを走らせながら、Wi-Fiの強さの分布を記録させます。 記録したWi-Fiの中で、各地点で一番強いWi-Fiを描画したのが下の「電波強度マップ」になります。
追従を行うときは、追従する人が持つスマホで検出したWi-Fiの情報をロボットに送り、ロボットはそれをマップから参照して、人の位置をとる、という仕組みです。
これは大学の11階の廊下で記録したWi-Fiの分布ですが、街中ではこんな感じで大量のアクセスポイントが設置されています。 Wi-Fiを使えば、新しく設備を追加したりしなくても、屋内でも位置情報を取ることができます。