実環境でのロボットの自己位置推定
2023年10月10日
こんにちは。B4の落合です。 私は人間を追従しながら目的地へ到達する移動ロボットについて研究しています。 その中で実環境での自己位置推定の実験を行ったので紹介したいと思います。
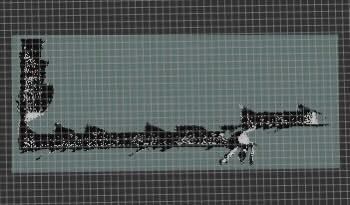
ロボットが実環境で走行する上で、走行中に自己位置を把握している必要があります。 人間と一緒で自分が今どこにいて目的地はどこにあるのかなどを分かっておく必要があります。 そのために、ロボットが走行中に自己位置を推定できているのかの確認の実験を行いました。 ロボットを中野11階にある研究室からトイレまでコントローラーで走行させてロボットの位置を出力しました。 次の2枚の画像が実機走行したときの様子です。
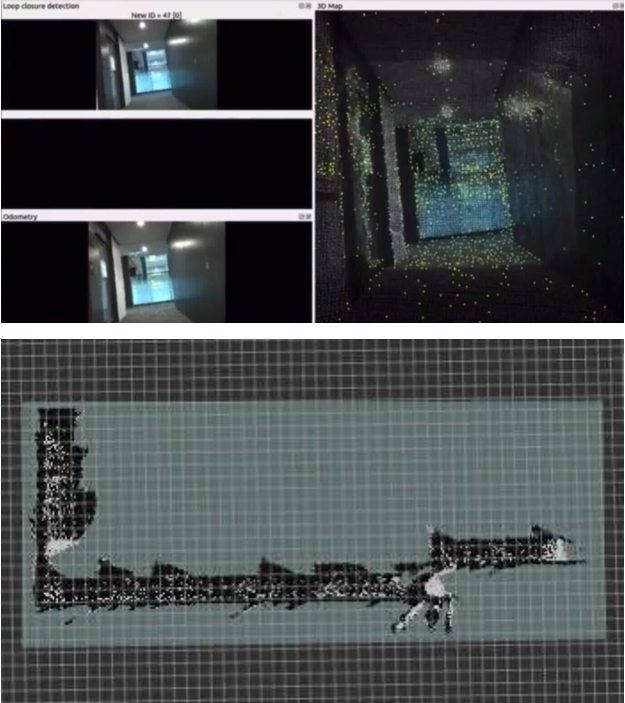
1枚目がロボットに搭載してあるRGD-Bカメラから見えている画像で、この画像から得られるデータをもとに位置を出力しています。 2枚目がロボットを走行させて位置を出力させたものになります。 この実験により、ロボットが自己位置推定しながら走行できていることが確認できました。