移動ロボットの汎用的な行動モデル作成の手順紹介!
2023年12月19日

こんにちは、B4の関です。前回は自己紹介のような形でのHP更新でしたので、 今回は私が行っている研究につていご紹介したいと思います。
研究題目:多様な仮想環境での強化学習によるカメラ画像を入力とした移動ロボットの汎用的な走行モデル獲得 これだけ見ると何言ってんの?ってなると思うので、簡単に言うとロボットが目的地まで走行できる頭脳を作っちゃおうというような研究です。 具体的には、以下のようなステップで汎用的な走行が可能なロボットの頭脳を作ってしまおうと考えています。
1-1:先行研究から得られた行動モデルで実機走行検証
昨年度、卒業されてしまった海保さんというお方の学習モデルを上記システムに組み込み、走行検証します!
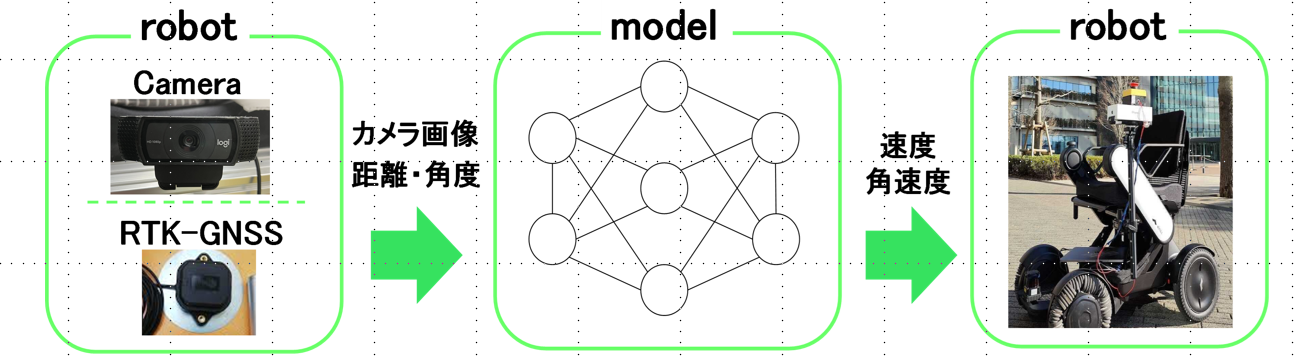
1-2:Unityで下記画像のような都市環境を自動生成し、その環境でカメラ画像、目的地までの距離、角度を入力としてロボットに学習させる。また、1-1で得たFBを活かした学習をさせる。
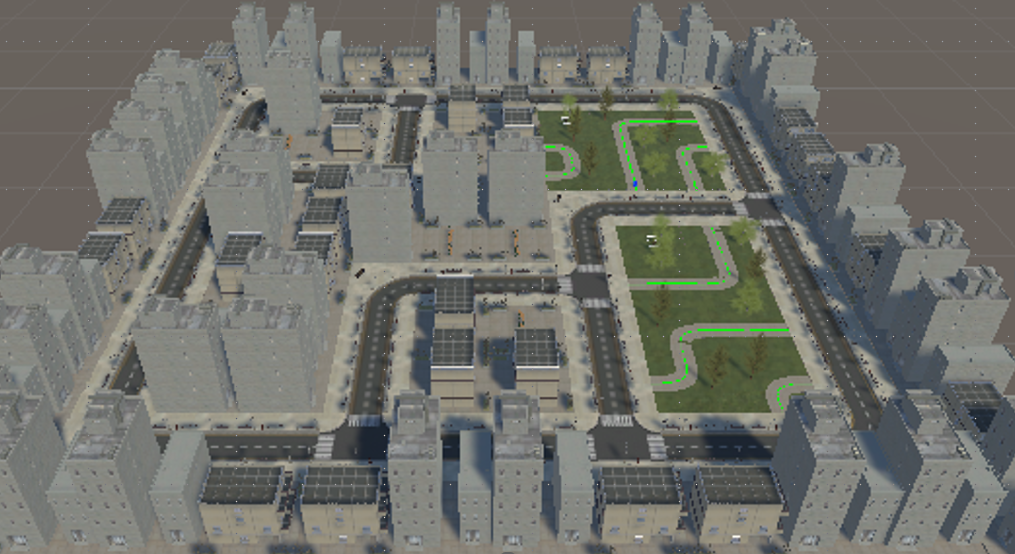
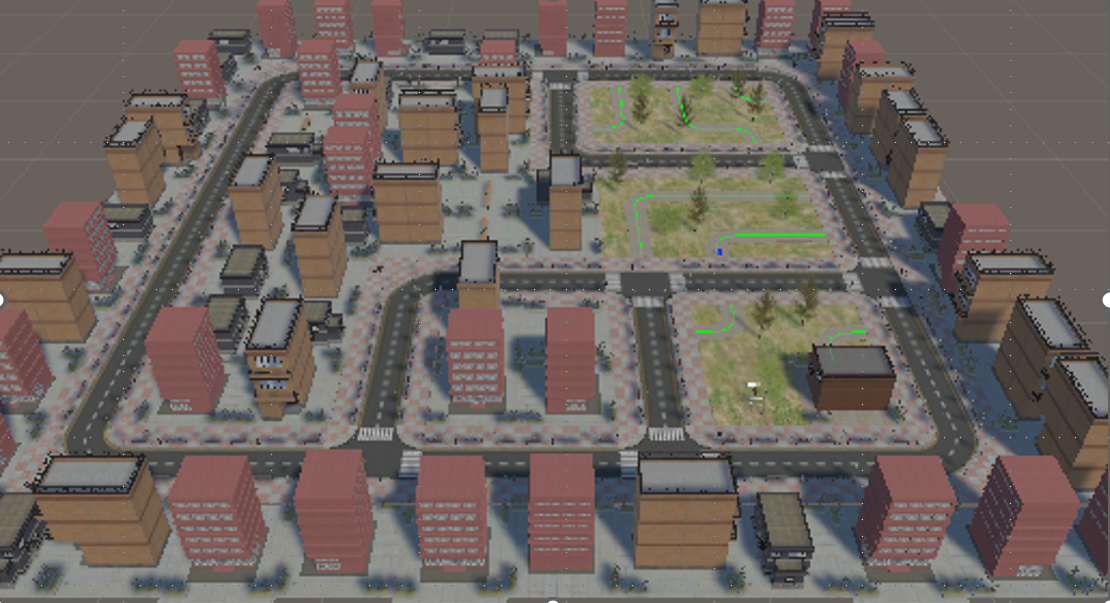
2:学習させた環境とは別の下記画像の様な仮想環境を準備し、走行実験
3:仮想環境である程度走ることが出来たら、実環境でロボットに学習させたモデルを適用し、走行実験。
4:2及び3から得た結果により、問題点、改善点を洗い出し、1-2の学習へと反映。
次回は研究の進み具合について掲載いたしますのでお楽しみを!!