移動ロボットの汎用的な行動モデル獲得における現状と走行結果に関するまとめ
2023年12月19日

こんにちは、B4の関です。続いてのHP更新になるのですが、前回の内容から今回は研究の進捗とまとめについて掲載したいと思います!
前回の研究ステップに基づいて記載していきます!
1-1:先行研究から得られた行動モデルで実機走行検証
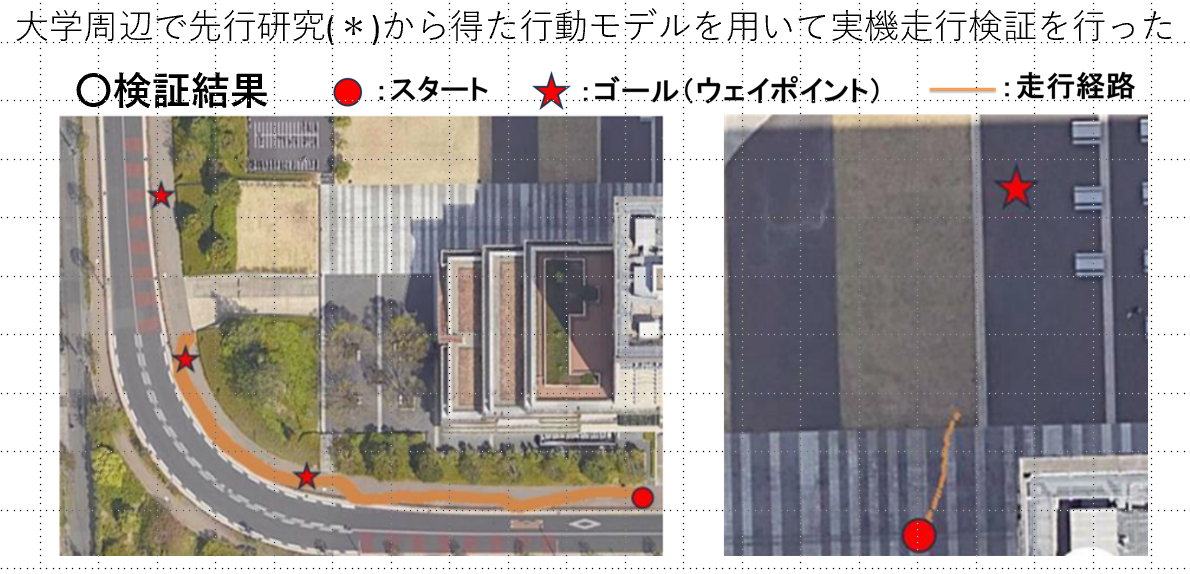
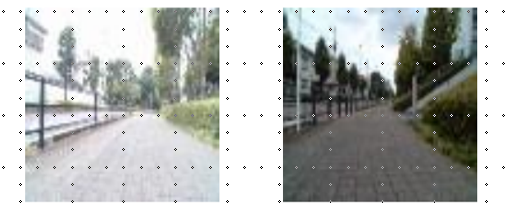
*まとめ* ・従来研究で得られた行動モデルは、ウェイポイントを2つ通過して(左図)それなりの距離を走行している。 ・草道を認識しての走行が不可。 ・学習時と近い画像が得られた場合は走行できる能力があるが、照明条件などの変化(下記入力画像)には対応できない様子がうかがえた。
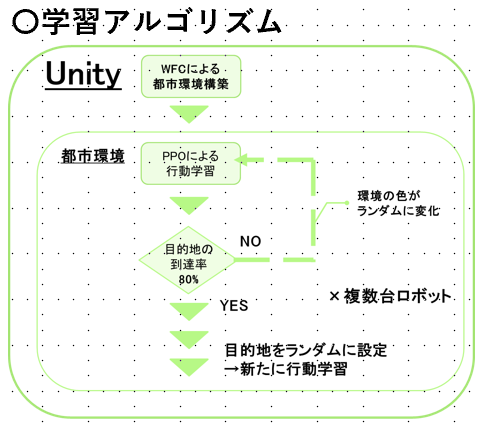
1-2:Unityで下記画像のような都市環境を自動生成し、その環境でカメラ画像、目的地までの距離、角度を入力としてロボットに学習させる。また、1-1で得たFBを活かした学習をさせる。 →1-2より、多様な環境、入力画像に対応できるような学習をさせたい!
そこで、学習中の環境照明の色をランダム化、ゴールの位置を目的地到達率に合わせて変更などと、多様な環境、入力での学習ができるように工夫してみた。

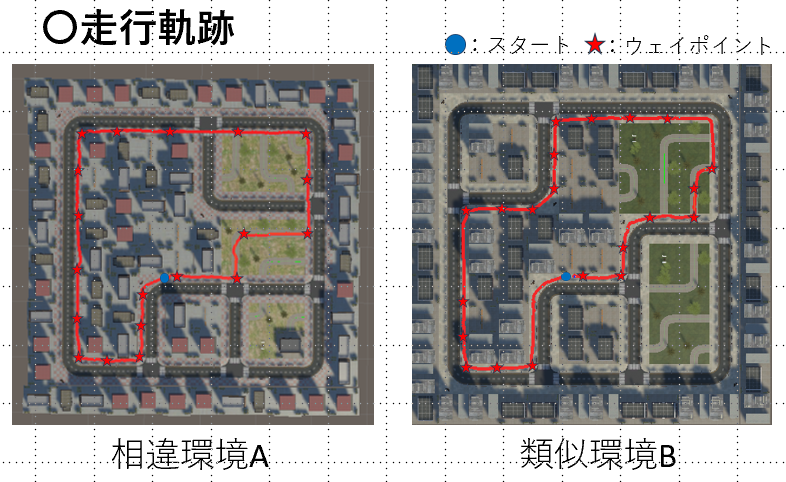
2:学習させた環境とは別の下記画像の様な仮想環境を準備し、走行実験 →1-2より得た学習モデルで2つの環境(A、B)を走行実験用に準備し、走行テストを行いました。 環境A:学習時と同じパーツで構成された環境 環境B:学習時の環境とは全く異なるパーツで構成された環境
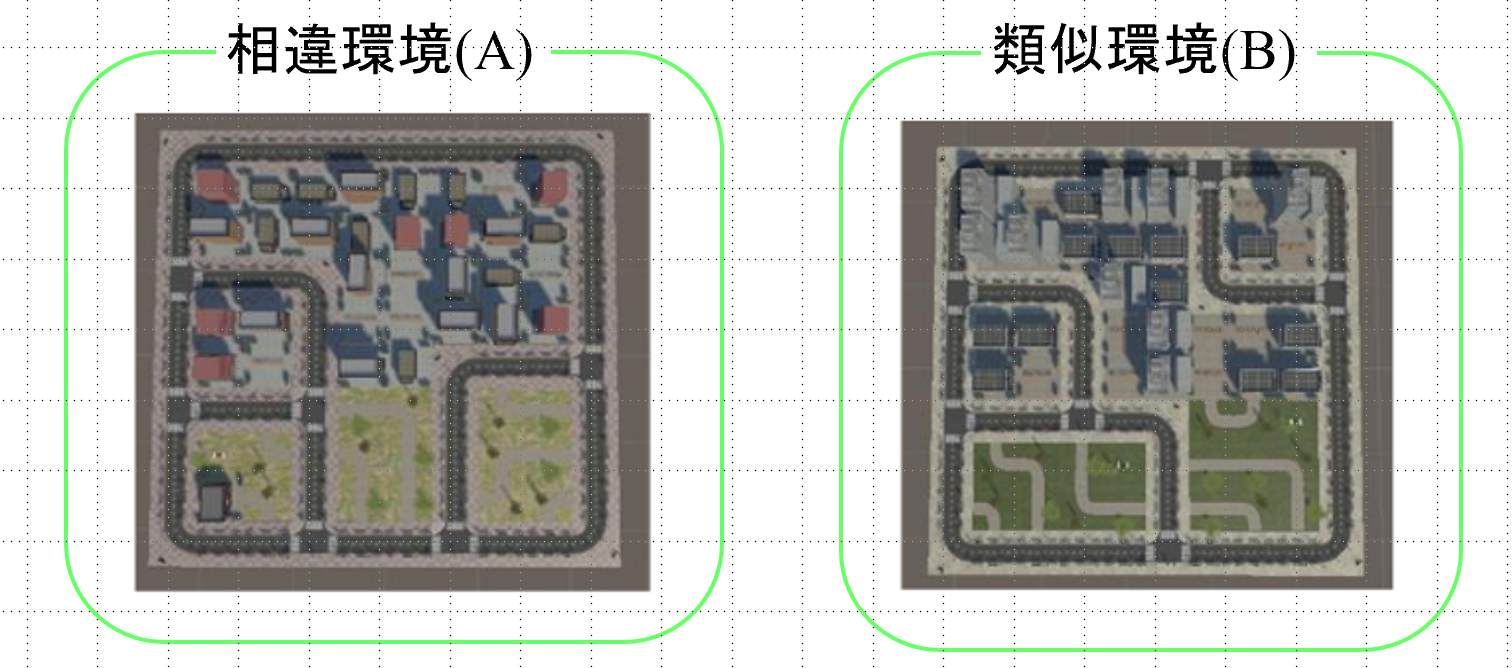
走行の結果としては下記の様にウェイポイントを置き、走行させることで、環境を1周できることが確認できました!
3:仮想環境である程度走ることが出来たら、実環境でロボットに学習させたモデルを適用し、実機走行実験 →2で作成したモデルで走行実験を計画しています!
4:2及び3から得た結果により、問題点、改善点を洗い出し、1-2の学習へと反映。 →今後にご期待を!!
以上、現在の研究の進捗としては、このような感じになります! 今日は、新潟の学会発表なので、頑張ります!!