Webアプリを用いて仮想環境と実環境のロボットを同時に動かす
2023年12月21日

こんにちは。B4の塚本です。
私は、『仮想環境と現実世界をシームレスに移動できるロボットネットワークシステムの構築』というテーマで研究を行っています。
前回の記事では、Unity内に簡易的な環境を用意し、Webアプリからウェイポイントを送ることによりロボットを動かすということについてお話ししました。
今回は、下記のように変更をし、動作検証を行いました。
・Unity内の環境を大学構内の11階のフロアに変更
・実環境でも同様に11階にロボットを用意
・Webアプリから仮想環境と実環境の両方にウェイポイントを送り、ロボットを動かす
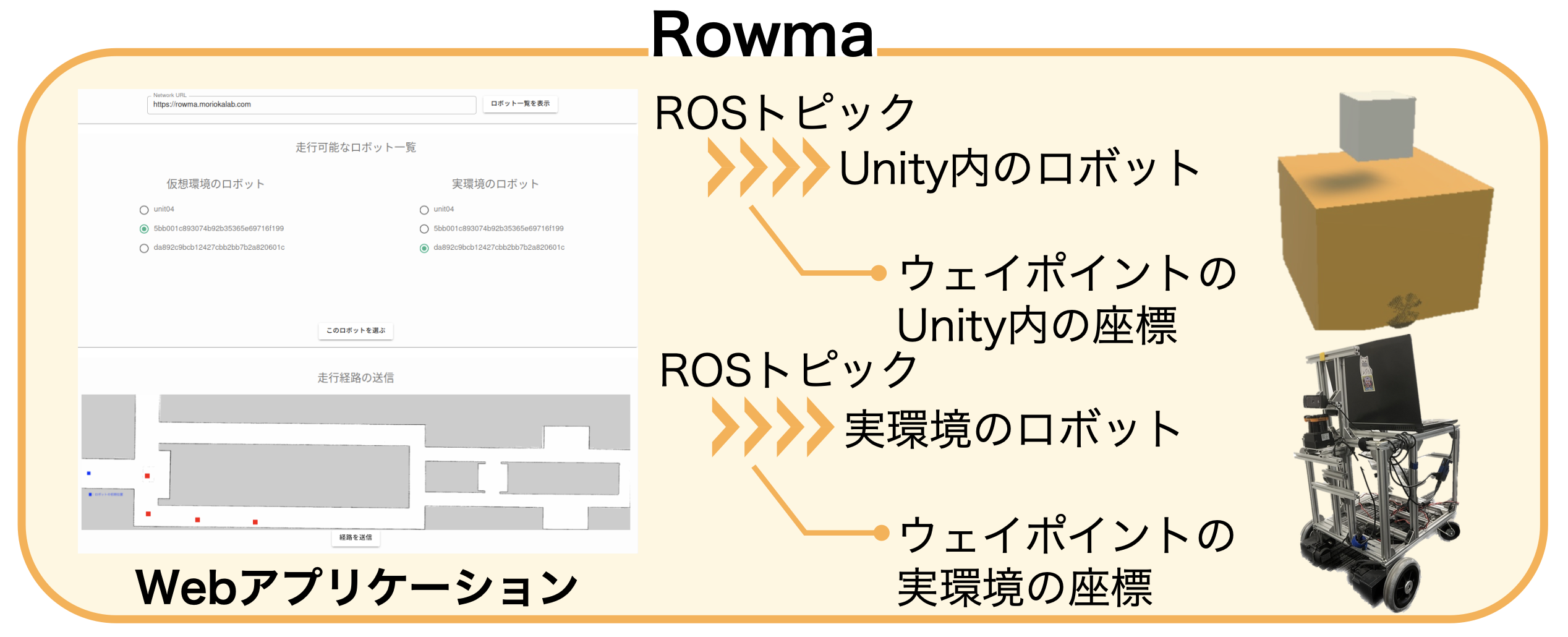
下図は、システム構成になります。
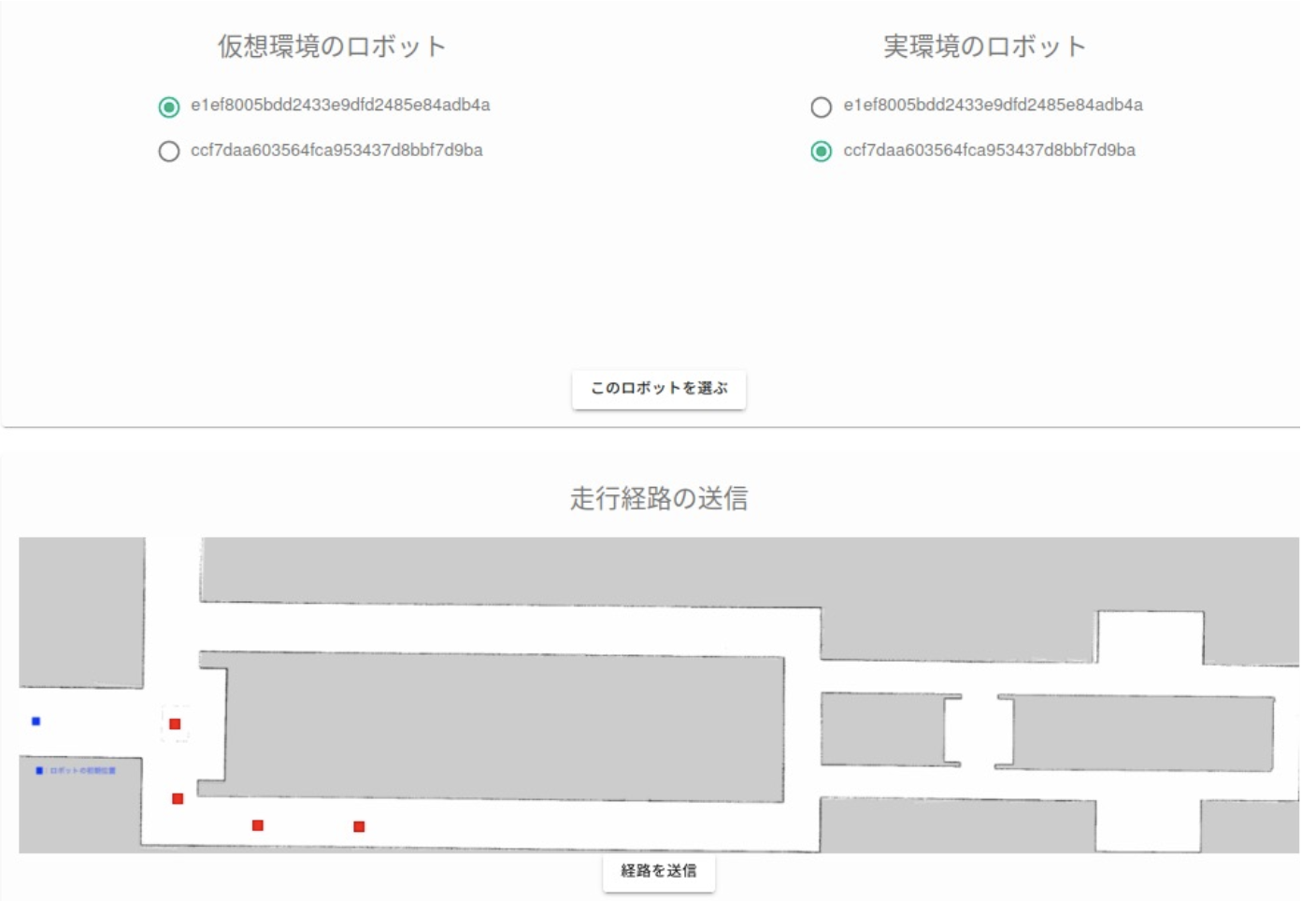
動作検証時のWebアプリは、次のようになります。
仮想環境のロボットの走行軌跡を左図に、実環境のロボットの走行軌跡を右図に示します。
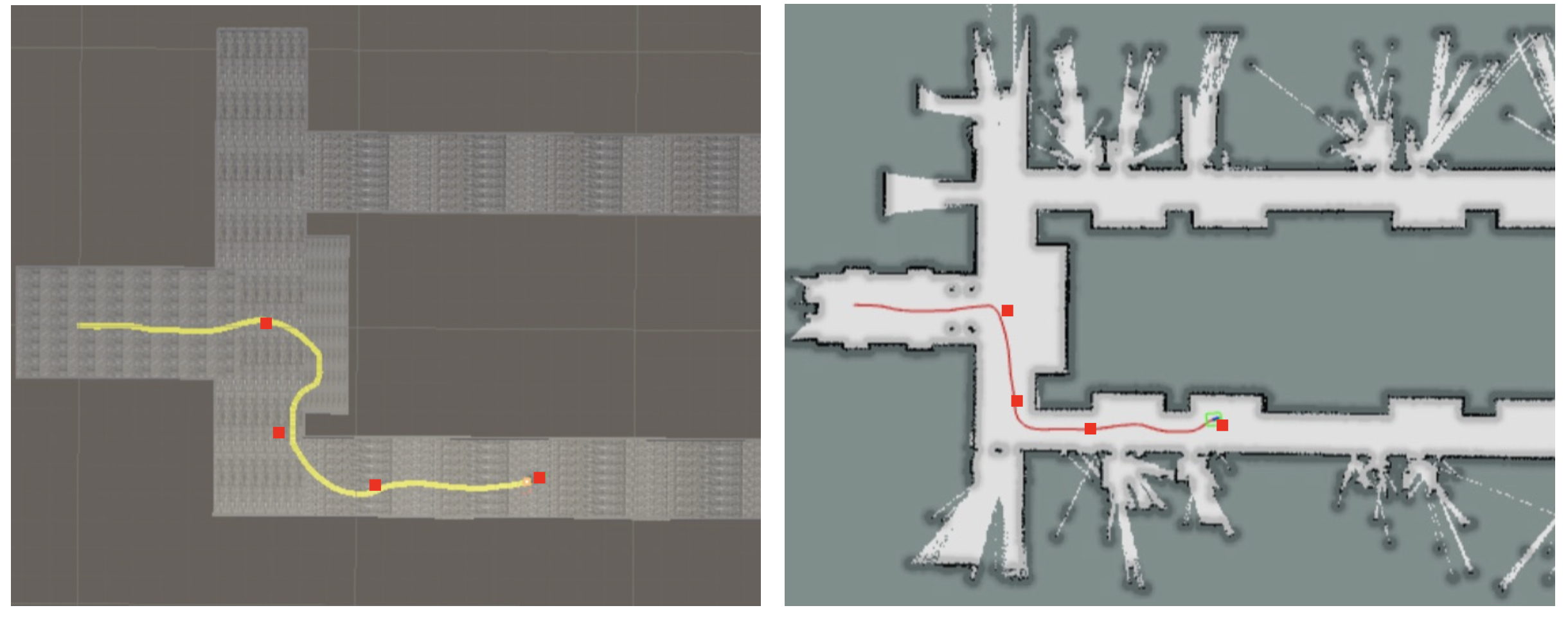
Webアプリから同時に2つの世界のロボットを動かし、指定した走行経路で自律走行することができました。
今回は以上になります。見ていただき、ありがとうございました!