ブロックチェーンを使った情報共有システム(2)
2024年02月09日
B4の坂井です。 前回に引き続き自分の研究内容について紹介しようと思います。
前回は概要とコンセプトを紹介しましたので、今回は実際にUnity内で走行する際の流れと実験結果を紹介したいと思います。
まずはシステム図の紹介です。
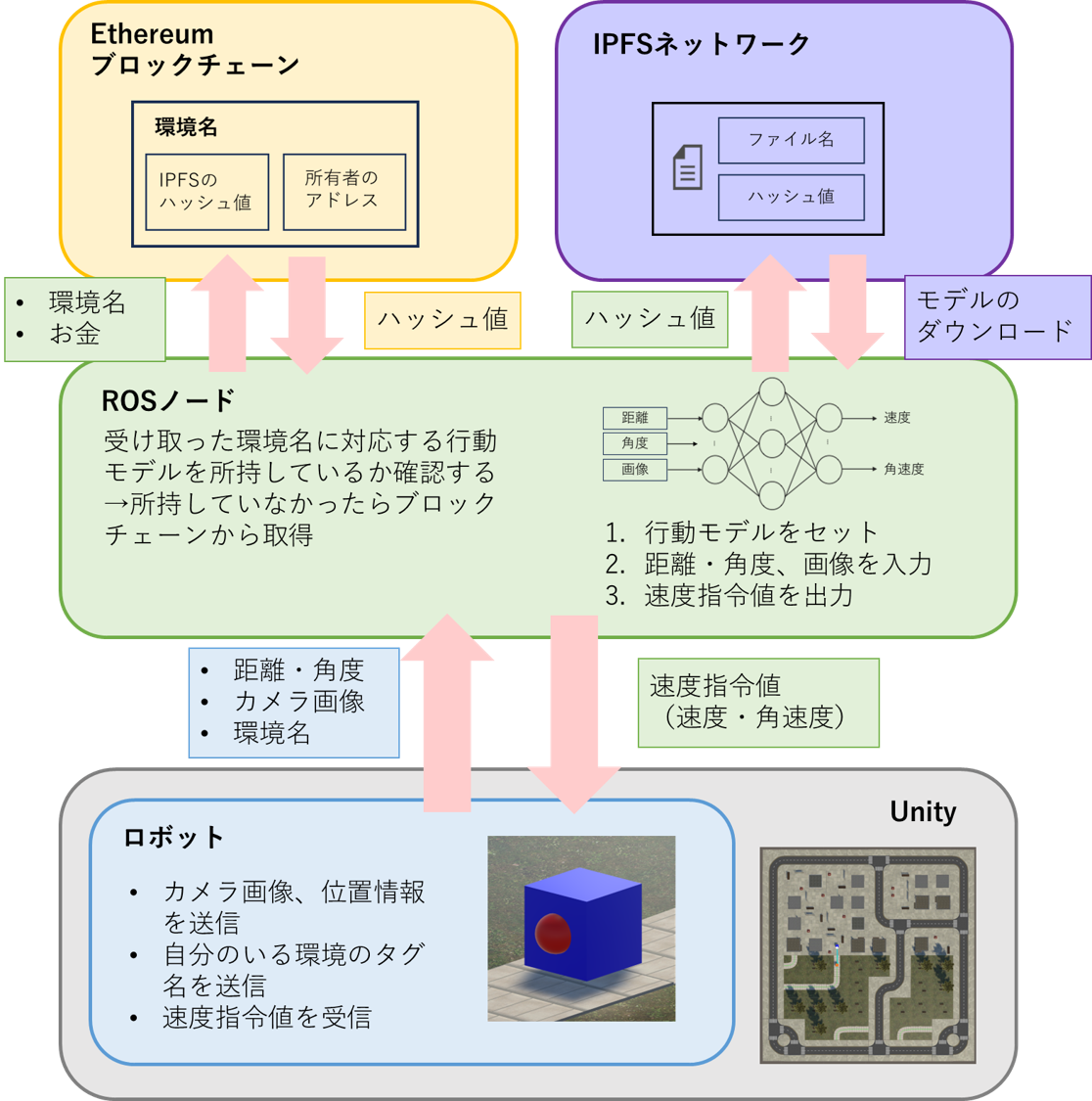
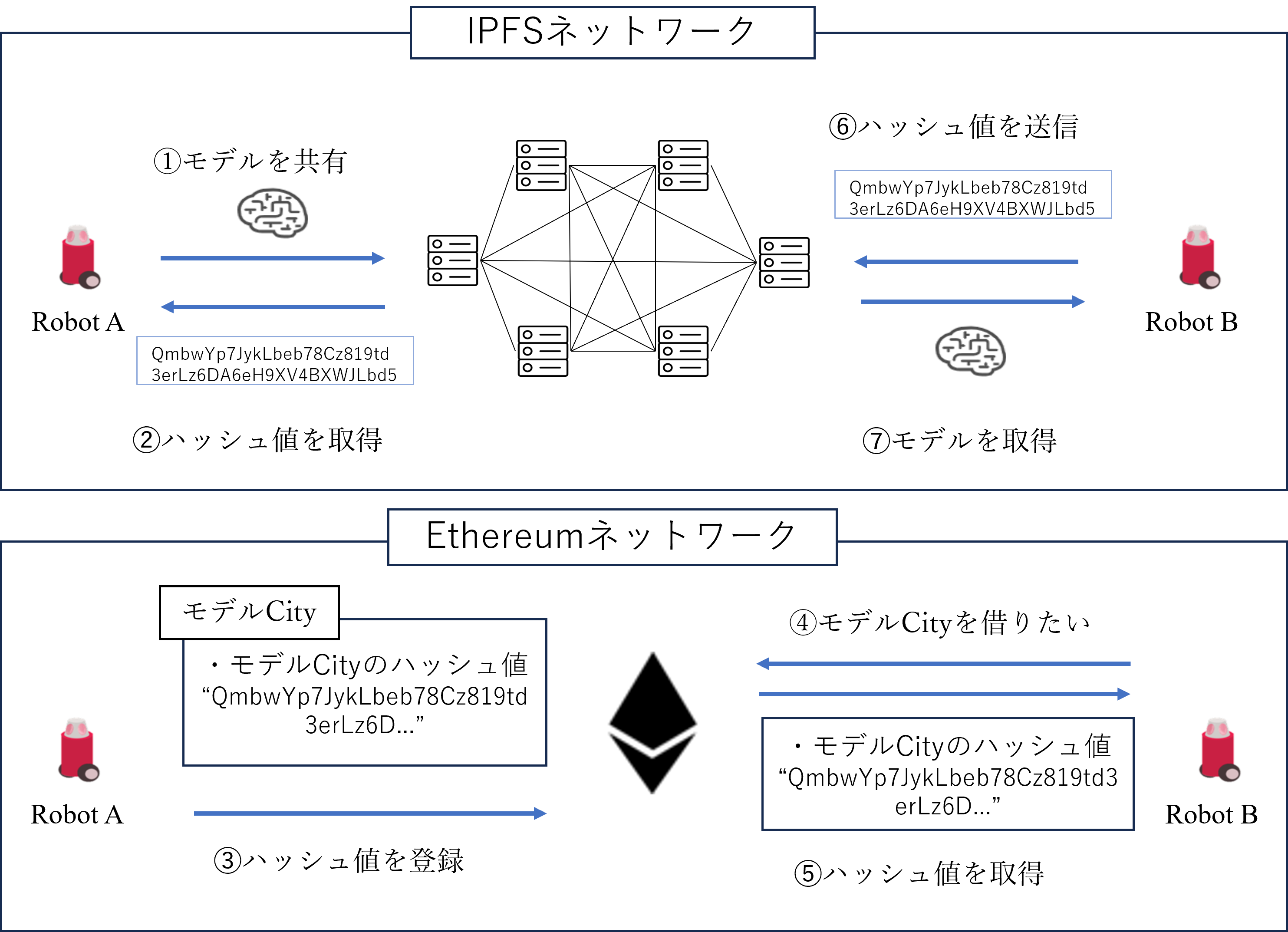
提案システムを使った走行までの順序です。
(1) 走行環境に適した行動モデルをIPFSから取得する。 (2) 取得したハッシュ値の値を確認する。 (3) 行動モデルをROSノードにセットする。 (4) 距離・角度とカメラ画像をサブスクライブするとモデルの出力が開始される。 (5) 出力された速度・角速度をUnityのロボットへとパブリッシュする。
この研究では実際のデータ保管場所はEthereumブロックチェーンではなくIPFSと呼ばれるコンテンツ指向のネットワーク上に保存しています。
実際にシステムを使ってUnity内で走行実験を行い目的地まで走行できることも確認しました。
 2つのモデルを使って走行を行い、モデルの所有者と利用者の間で残高の変動を確認することができました。
2つのモデルを使って走行を行い、モデルの所有者と利用者の間で残高の変動を確認することができました。
今後はロボットの台数や、共有するモデルの数を増やした場合のシステムを作成していきたいと思います。