Scaniverseを使ってみました
2024年05月20日
B4の佐多です。
先日行った全体ゼミ内で、僕は「自動走行を補助するために自前のスマホのカメラを利用してVisual SLAMを行うことができるwebアプリケーションの開発」を研究テーマとして取り扱っていくということを発表しました。 Visual SLAMというのは、自律走行ロボットが周囲の状況に合わせて適切に移動することができるように、Webカメラなどを使って撮影した大量の画像データから周辺の環境地図を作成するという技術です。 今後しばらくはVisual SLAMの勉強を進めようと思っており、それに伴って同じくB4の学生から「Scaniverse」というアプリを紹介してもらったので共有します。
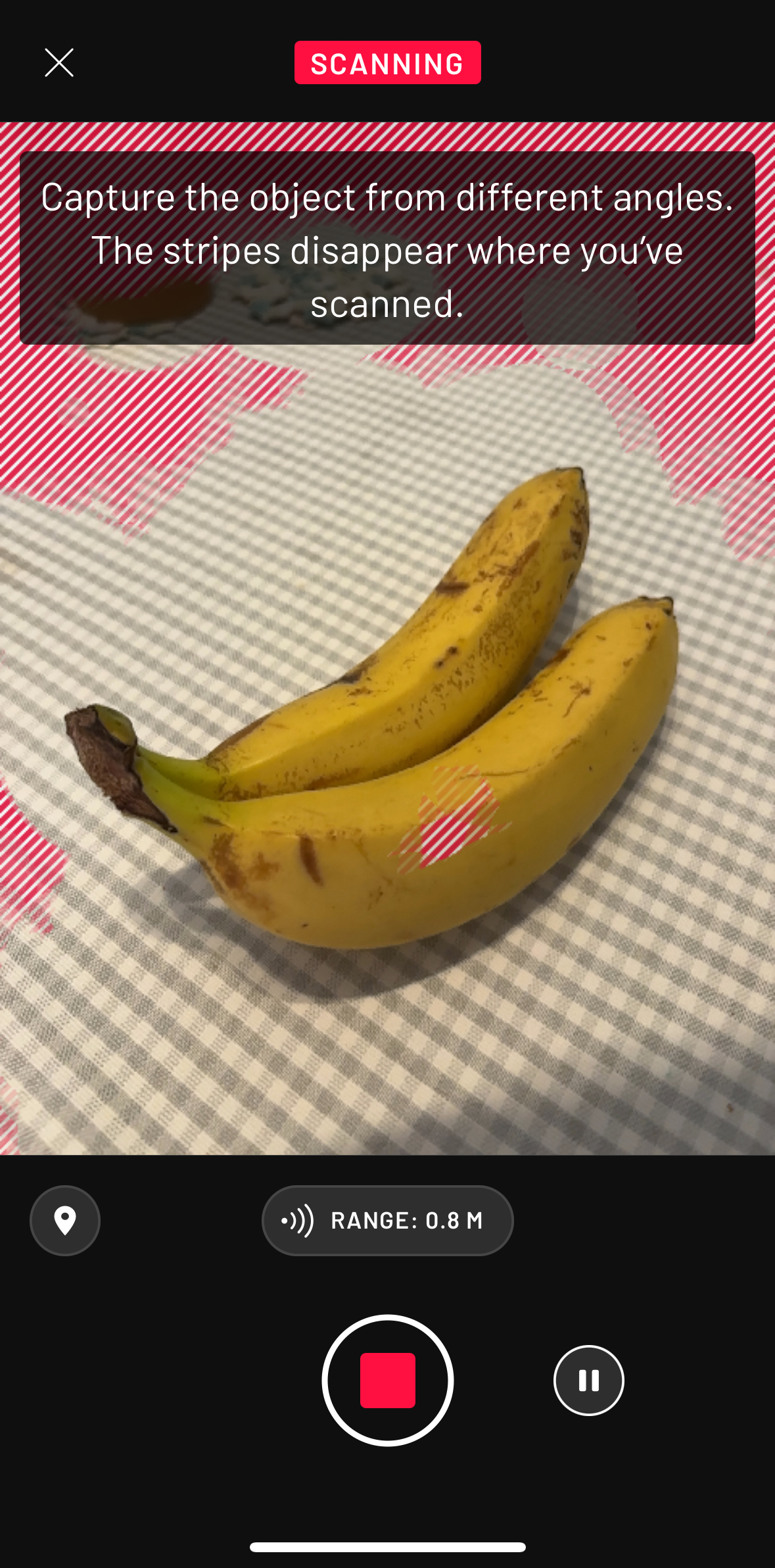
Scaniverseは通常のスマホのカメラで録画をするように撮影することで、物体を3Dモデル化することができます。 今回はサムネイル画像にある通りバナナを撮影してみました。 バナナをあらゆる方向から撮影し、形式を選択してものの十数秒で下の画像のように精密な3Dモデルデータが完成しました。 撮影が甘かった部分は正しくモデル化できていない部分もありましたが、iPhoneのカメラでここまで素早くきれいなモデルデータを構築できるということには正直驚きました。 ただ、そこそこ重い処理をする関係上スマホが熱を持ちやすいというのが少しネックだなとも感じました。
ScaniverseはまさにVisual SLAMを利用したアプリであり、自分の研究に活かすことができそうだと感じました。 今回の経験をもとに引き続きVisual SLAMについて勉強をしていこうと思います。
