環境地図の事前作成を必要としない屋外自律走行システムの提案と実機走行検証
2024年09月08日

こんにちはM1の関です。今回は、私が現在行っている研究の近況を報告します!
研究テーマ:「環境地図の事前作成を必要としない屋外自律走行システムの提案と実機走行検証」 簡単な内容としては、屋外で単眼カメラ画像を入力とした深層強化学習モデルによる自律走行システムの開発と評価を行っております。 以下にシステム構成、最近の屋外での自律走行結果を示しておきます。
1:システム構成
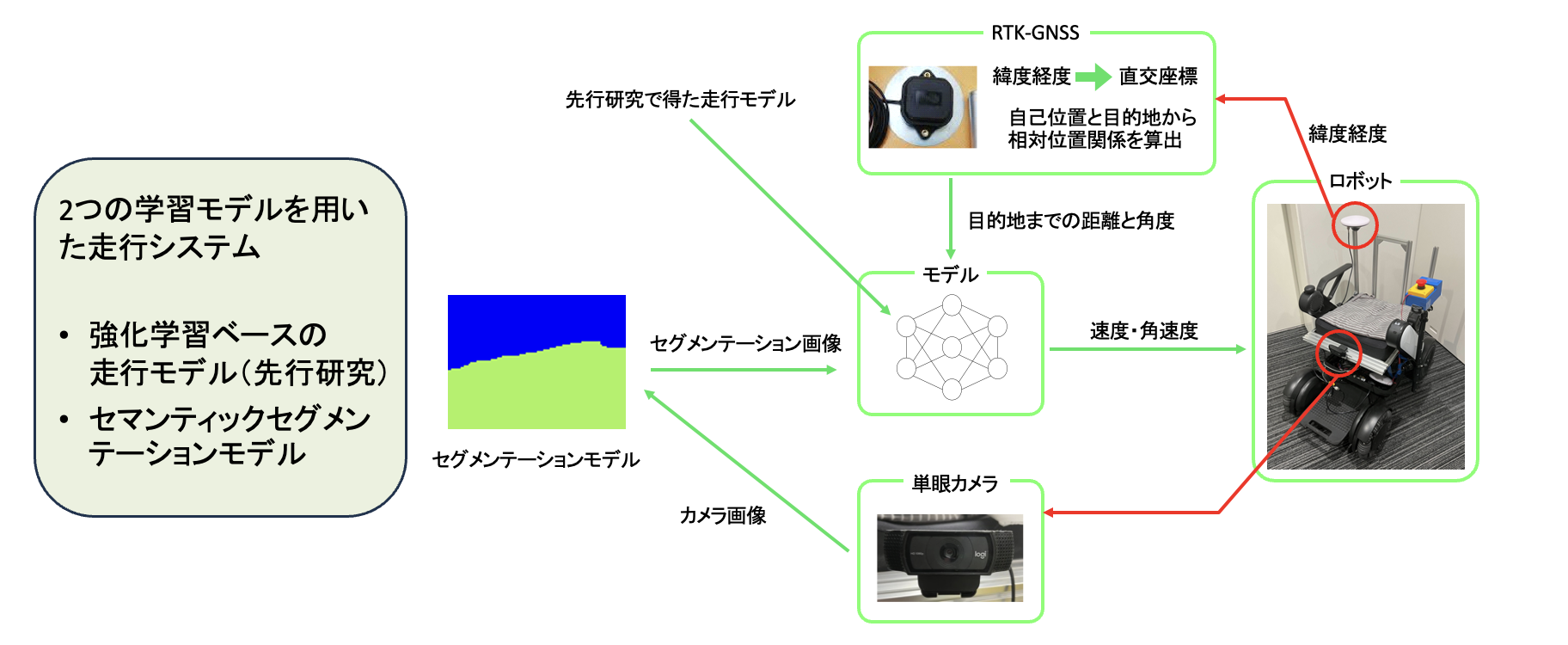
昨年度、卒業された鶴田さんの研究を屋外用に変更したものを使用しており、2つの学習モデルを含めたシステム構成となっております。
*強化学習ベースの走行モデル
*セマンティックセグメンテーションモデル
入力としては前方についている単眼カメラから画像をセグメンテーションモデルに通して、セグメンテーション画像を入力としています。 また、目的地までの距離角度は、上部についているRTK-GNSSから得られる緯度経度情報を用いて算出し、入力としています。 それぞれのモデルについて詳細が知りたい方は、是非私に話しかけてください!
2:走行実験
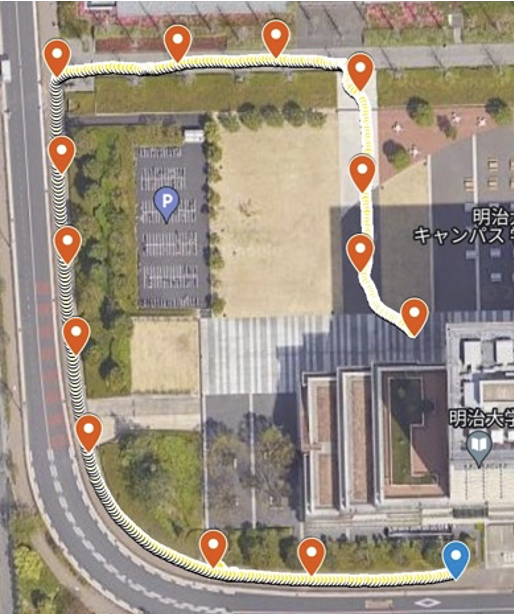
オレンジのピンの通りウェイポイントを適宜設定し、地図上の下部分の道路(青が始点)から中庭付近(赤が終点)までの走行実現しました。 画像内の位置情報(黄色)をプロットした通り、最後まで問題なく走行ができました。
今後も研究の進み具合について掲載いたしますのでお楽しみを!!