シミュレータで走らせてみた
2020年05月05日
初めましての人は初めまして、そうでない人はご無沙汰してます、4年になりました海保です。
コロナのせいで大学に行けないため、4年生になった実感がありません。本当にぶっコロナって感じです。
さて、前回はシミュレータでの行動学習用地図の自動生成について話しました。
今回はその地図を使用し、シミュレータで走らせてみた!について話そうかなと思います。
今一度なぜ地図を自動生成をする必要があるのかについて説明します。
簡潔に説明すると、面倒くさいからです。
シミュレータの地図は座標と座標を繋いで、壁ごとにマップを作成していくのですが、まあこの作業が面倒くさいです。
というのも、簡単な十字路くらいなら比較的簡単に作れますが、ロボットにしっかりと学習をさせなければならないため、あまり簡単過ぎても意味がないためです。
こういった経緯があり、Google Mapなどから自動生成できたら便利だということでこの研究を進めています。
それでは、実際にシミュレータを使用している写真をご覧ください。
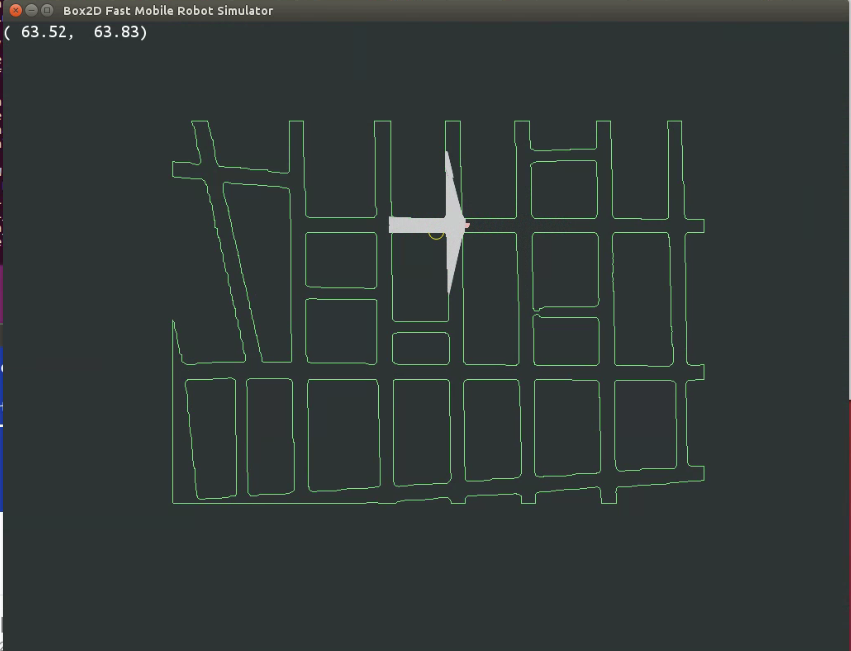
しっかりと自動生成した地図で学習してくれるのか心配でしたが、手動で作成した地図同様にロボットが学習してくれました!
Google Mapなどの地図を適当に用意するだけで、学習環境を整えることができたのは少しは意味のある事かなと思います。
シミュレータでの学習は良好なので、実環境で走らせてみたいところですが、コロナのためそれは出来そうにないです。
ともあれ、ひとまずはゴールであるシミュレータの学習が達成できたので、満足しています。
このプログラムを勉強していく過程でPythonや画像処理について前より詳しくなったので、良かったです。
それでは、皆さんご一緒に。コロナを~ぶっ壊す!!!
ありがとうございました。