卒業研究
2020年05月08日
お久しぶりです。 大学院1年の古谷です。
今回の記事では学部時代の研究テーマについて紹介します。
私の研究テーマは「深層強化学習による行動学習に基づく事前の占有格子地図を必要としない移動ロボットの自律走行システム」です。
専門用語が多く、長いのでなんのこっちゃって感じだと思います。
これから簡単に説明していきます。
従来の自律走行ロボットのナビゲーションでは事前に作成した地図を必要としていました。
しかし、地図を作成するのはとても大変であり、地図がない環境では走行できないという課題があります。
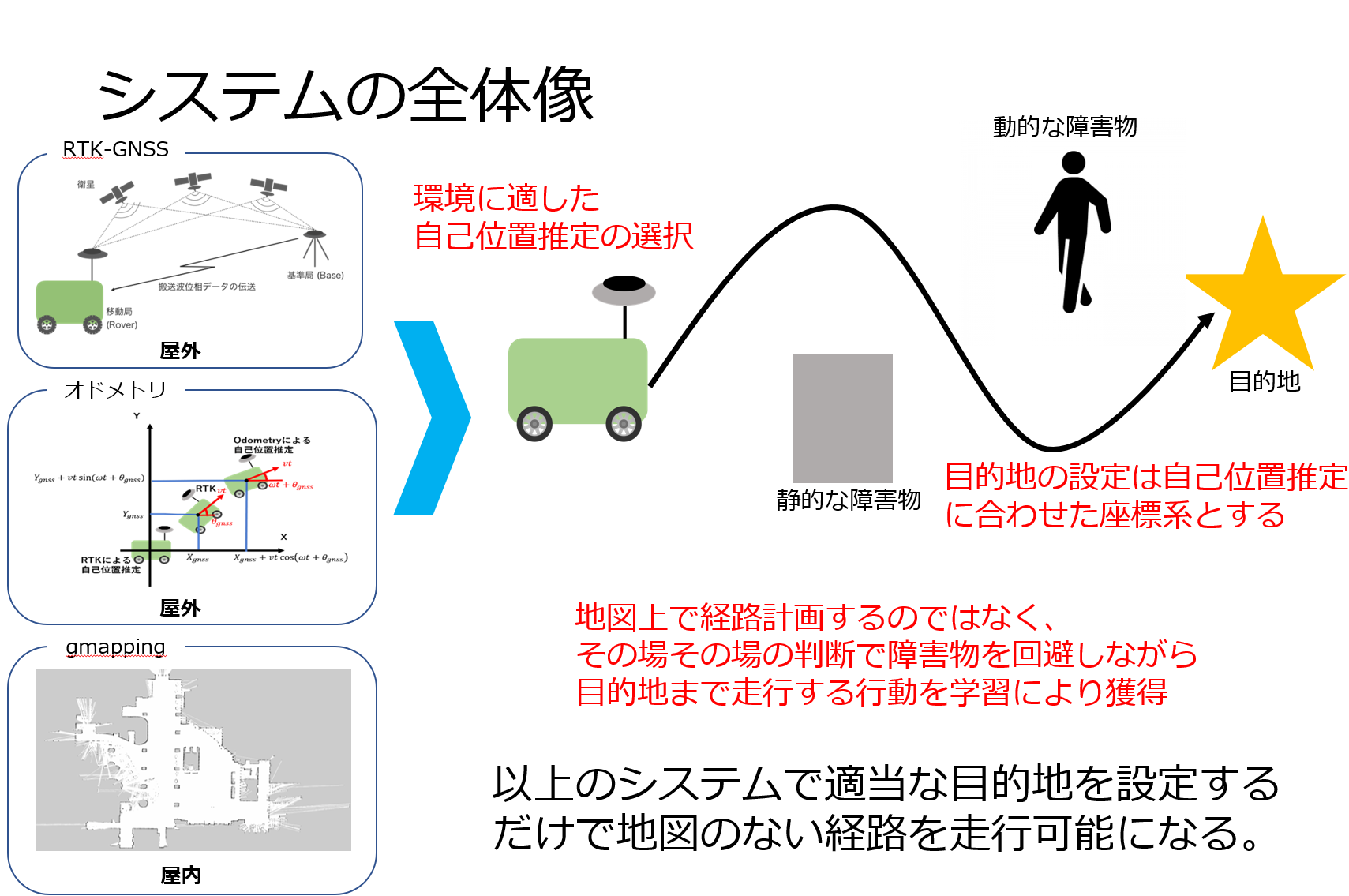
そのため、本研究では地図を事前に作成しないシステムの開発を行いました。
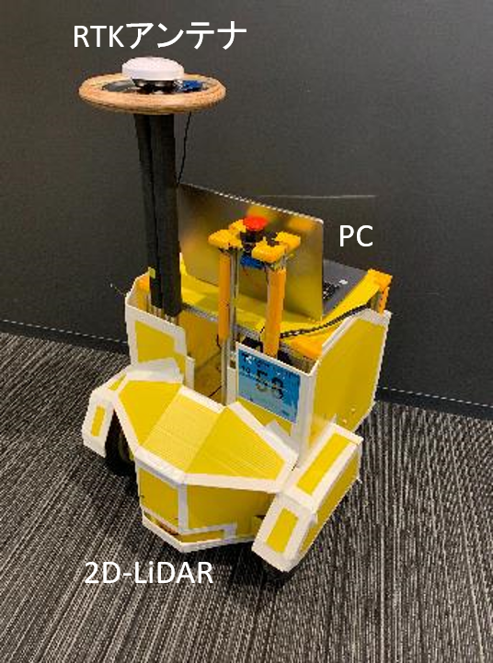
主に使用するシステムは深層強化学習とRTK-GNSSです。
深層強化学習は現在の状態からロボットが正しい行動を選択できるようになるまで学習を行います。
RTK-GNSSはGPSのようなものです。
深層強化学習はロボットの目的地に到着するまでの行動選択、RTK-GNSSはロボットの自己位置の推定に使用します。
また、ロボットの自己位置推定に関しては他の手法も使用しています。
 このシステムでつくばチャレンジに参加しました。つくばチャレンジとは自律移動ロボットの大会で、森岡研究室は毎年参加しています。
結果は最大で200mほど走行することに成功しました。
これからはより長く走行できるようにシステムの改善を進めていきます。
このシステムでつくばチャレンジに参加しました。つくばチャレンジとは自律移動ロボットの大会で、森岡研究室は毎年参加しています。
結果は最大で200mほど走行することに成功しました。
これからはより長く走行できるようにシステムの改善を進めていきます。