未知の環境で特定の人間を追従しながら目的地へ到達する移動ロボット
2024年10月16日
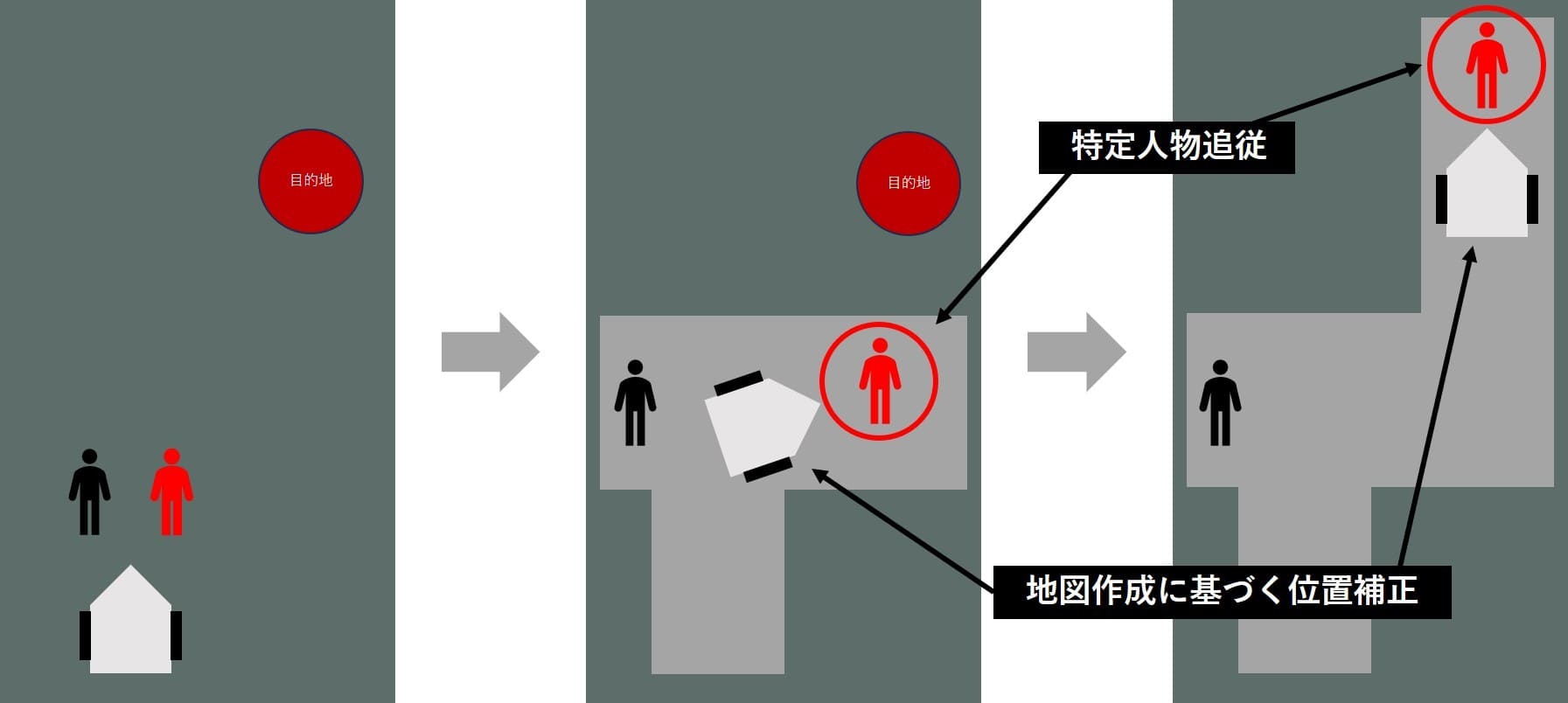
こんにちは。M1の落合です。 私は未知の環境で特定の人間を追従しながら目的地へ到達する移動ロボットの研究を行っています。 深層強化学習により障害物を回避しながら人間を追従して目的地に向かう行動モデルを獲得し、これを実機に適用して走行実験を行います。 今回は、最近の実験結果について書きたいと思います。
ロボットの前方に2人が立ち、そのうち1人を追従して目的地に向かうように実験を行いました。 中野キャンパス11階の学習環境とは異なる場所で実施しました。 赤い矢印が追従対象の人間ほ歩行経路で、黒い矢印がそれ以外の人間の歩行経路です。 また、ロボットの初期位置が青丸、目的地が赤丸で示した地点になります。
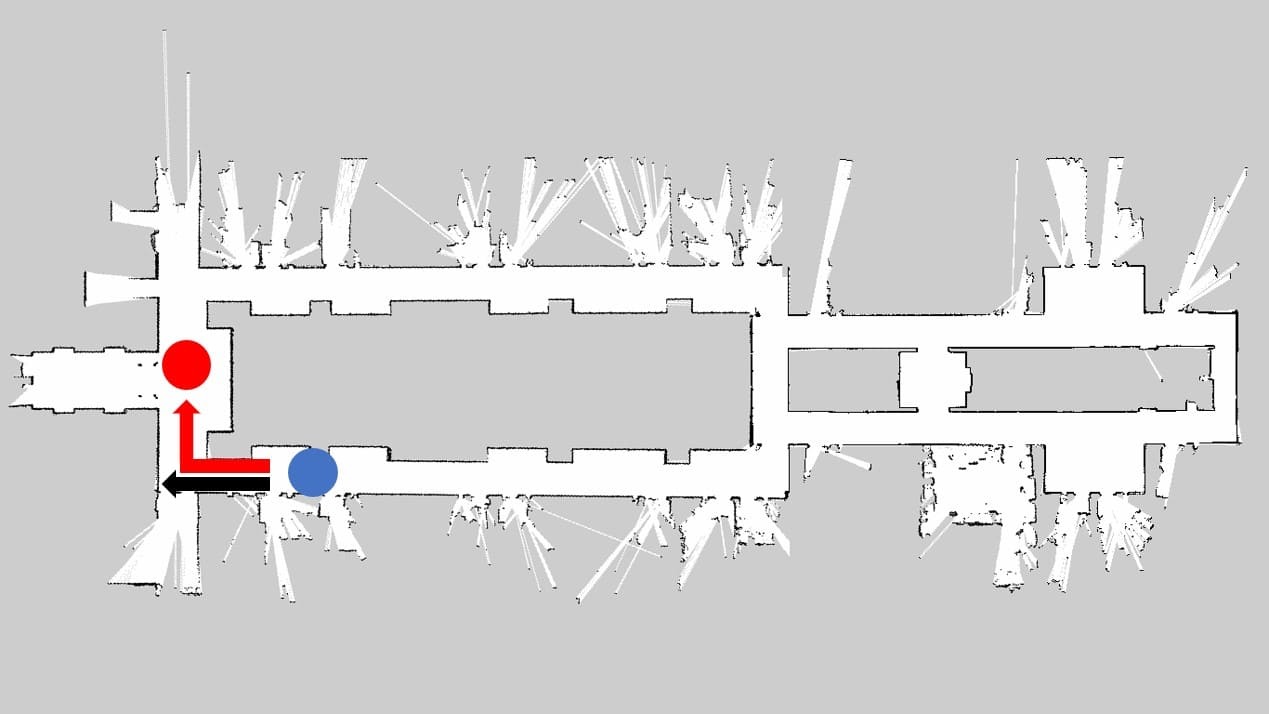
実験結果を下図に示します。
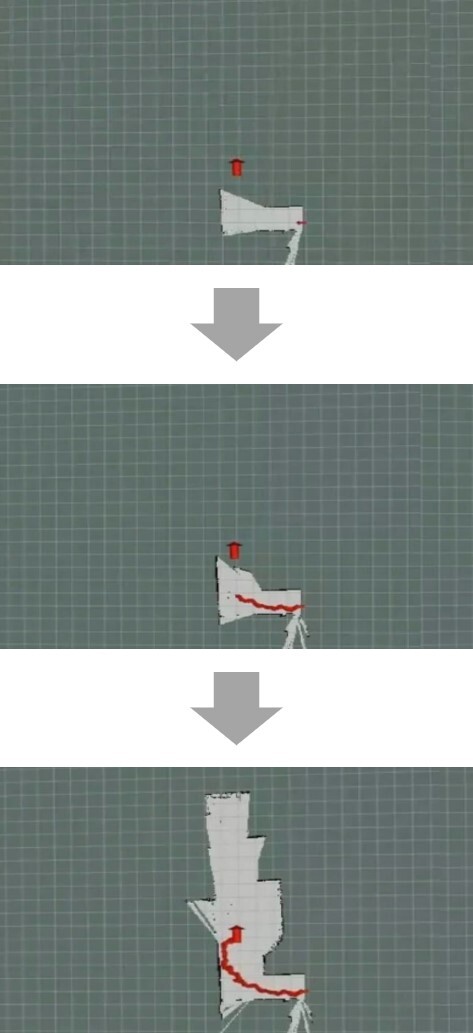
赤い矢印が目的地、赤い線がロボットの走行経路を示しています。 未知の環境でもgmappingにより自己位置推定と地図作成を行い、特定の人間を追従しながら目的地まで走行することが確認できました。 曲がった先で壁に近くなってしまっている箇所はありますが、曲がり角にぶつかることなく走行できていました。