セマンティックセグメンテーションを活用した画像認識での障害物回避しながらの目的地への到達
2024年10月24日
こんにちは
B4の曽田です。
セマンティックセグメンテーションなどの画像認識を活用し、機械学習によりロボットを自動走行させ障害物を避けながら目的地まで到達することを卒論の目標とし、作業を進めています。
現在は
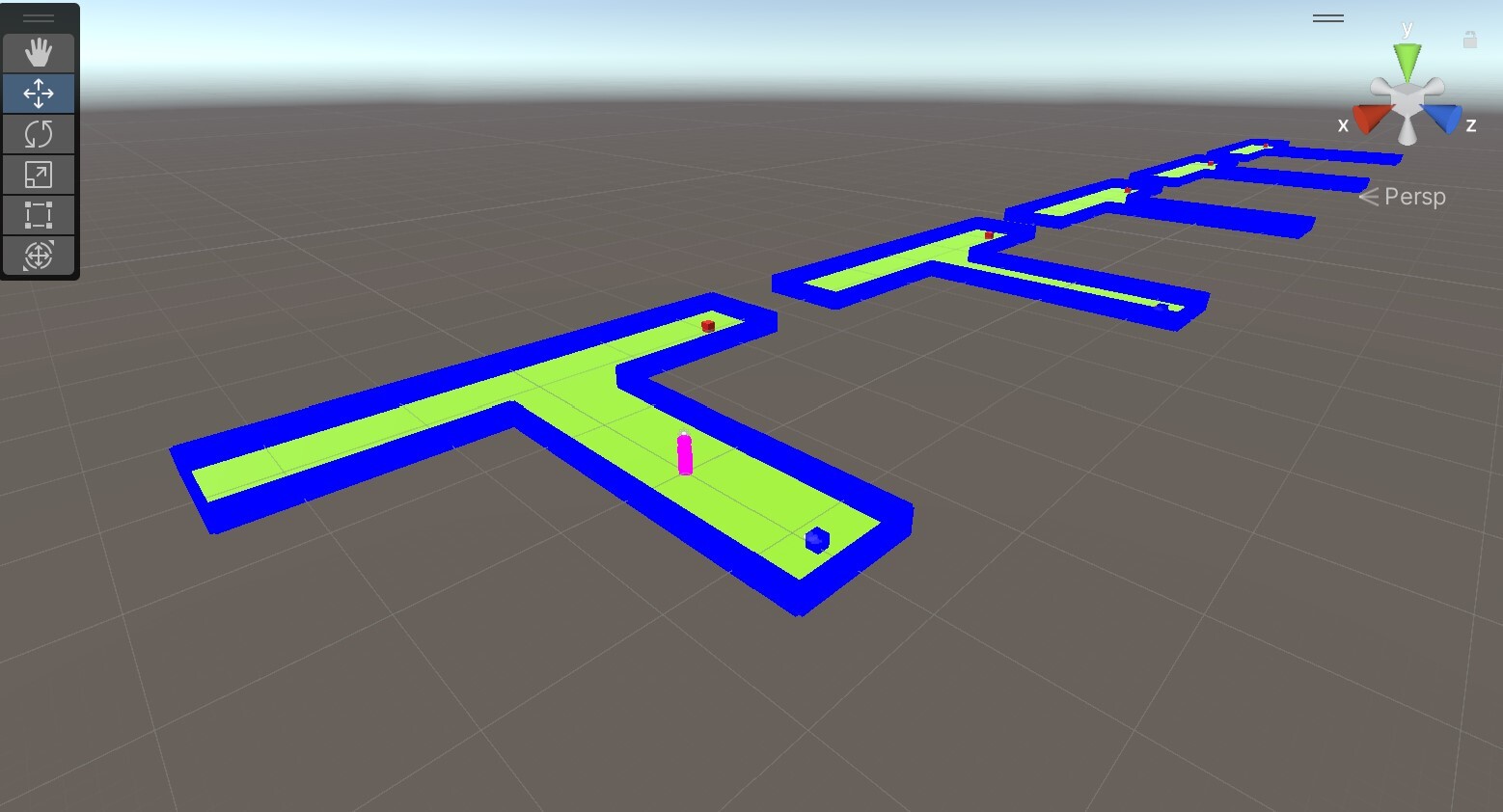
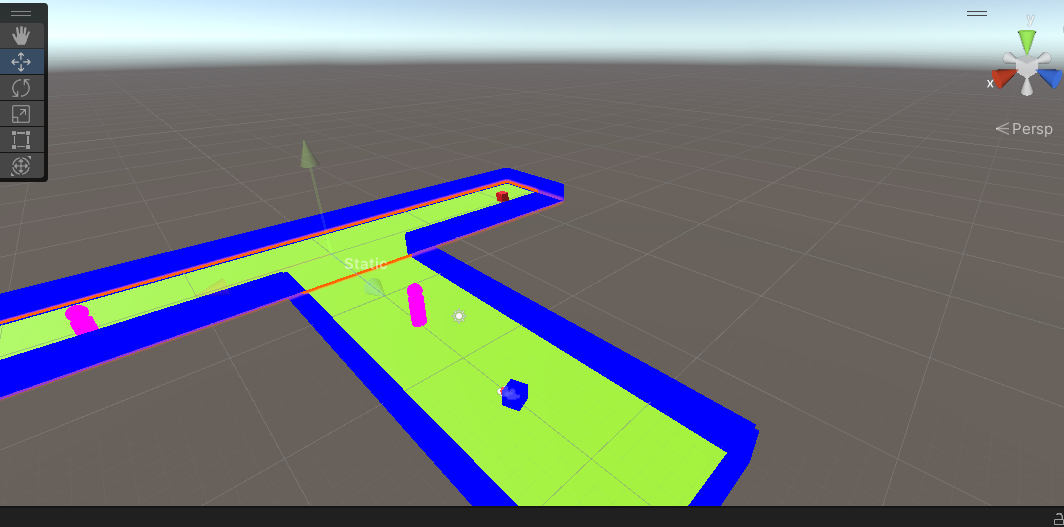
<Unity上に2色に色分け(2値化)した環境を再現> <カメラからの画像と目的地までの距離情報を状態として取込んだ画像認識によるシミュレータ上での走行学習にて自動走行用モデル取得> <取得したモデルにて同環境上での自動走行実施> <人などの障害物を追加した環境での障害物回避と走行モデル生成>
という作業を行いました。
今後はスタート地点やゴールの地点をランダムに発生させたり、人のスピードを変えるなどして、強化学習を行い精度を高めていきたいと思います。