[研究紹介]人間への追従を用いた移動ロボットの自律走行
2019年01月07日
あけましておめでとうございます! 森岡研4年の岸川僚太です。
年末は研究室メンバー何人かで忘年会を行いました。
個人的に食べに行きたかったチーズタッカルビを食べ、カラオケに行ったり何故か男だけでプリクラを撮るなどしていました()
今回は現在私が研究している移動ロボットの走行方法について紹介します。
現在私は2つの走行方法を切り替えながらロボットを走行させています。
1.センサなどで環境地図と周囲の距離情報を比較し、自己位置推定を行いながらの走行
2.同じ目的地方向に歩く人間を追従しながらの走行
移動ロボットの自律走行で用いられる走行手法としては1番目の手法が用いられることが多いです。
 ↑大学内で走行させた時の写真ですが、壁などの情報を得ながら走行しています
↑大学内で走行させた時の写真ですが、壁などの情報を得ながら走行しています
しかし、周囲に人がいて、周囲情報の取得が難しいとき自己位置推定をすることが難しくなってしまい、走行が困難になってしまします。 そこで行きたい方向と同じ方向に人間がいた場合その人間を追従することにより目的地まで走行できないか考えました。
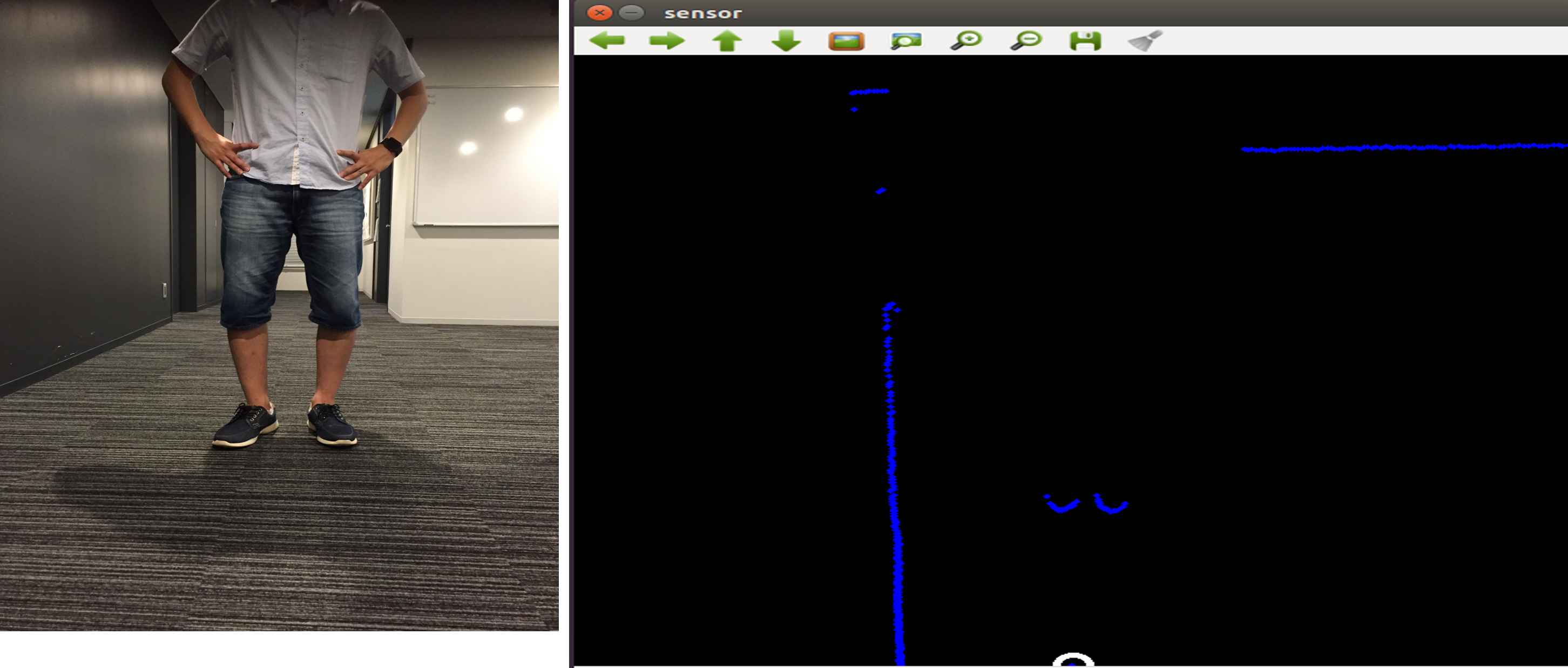 ↑センサで得られた周囲の距離情報を可視化したもの
人間の追従には画像処理を用いています。
↑センサで得られた周囲の距離情報を可視化したもの
人間の追従には画像処理を用いています。
この2つの走行方法を人がいる時いない時で切り替えながら目的地を目指します。
現在は卒業研究・卒業論文、内定を頂いた会社からの入社までの課題に追われていますが、今年も良い1年になればと思います。
最後になりますが、今年も森岡研、及びメンバーのことをよろしくお願いします。