ロボットシステムデザインでの実行結果について
2020年07月12日
初投稿です。3年一応ゼミ長の大津悠久です。今回自分は、森岡先生の授業で行なっている、自己位置推定の簡単な?(自分としては難しかったです)実行結果をお見せしたいなと思います。
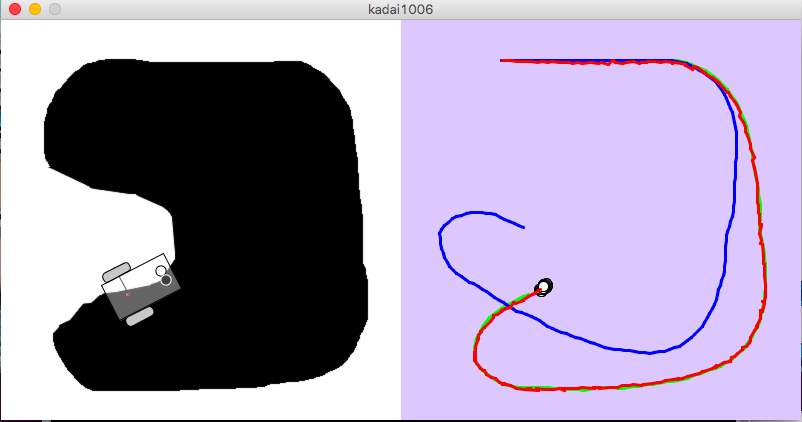
先輩方の研究内容をゼミの授業中に聞く機会があったのですが、貴重な先輩方からの発表も自分の知識不足でいまいちピンとこなかったこともありました。まずは、パソコン上でロボットが自分で思い通りに動いてくれたことに達成感をすごい感じました。 この実行結果の画像の説明をいたしますと、左側ではロボットに対して命令をプログラムで打ったものを実際に走っている様子が出力されております。右側には、三色の線と丸がいっぱい集まったものが見えると思うのですが、緑線が実際にロボットが走った道筋、青線がオドメトリ(ロボットの左右の車輪に入力された速度からロボットの移動軌跡を求める手法)という手法でロボットの位置を求めている線、赤線が自己位置推定の一種であるパーティクルフィルタでロボットの位置を推定した線、となっています。赤線を書くために使われているのが、白丸で表されているパーティクルというものになります。これはロボットがいるだろうと思われる位置にプロットされるようになっています。
このように長々と話してしまいましたが、今自分はこのようなロボットのシステムの基礎を学んでいます。初めての言葉や、プログラムコードなどに苦しんではいますが、できたときの達成感求めて課題等頑張っています!
また私ごとですが、コロナウイルスの影響で家にあまり出られず運動不足になりがちなので、自分の気持ち奮い立たせて少しは走るようにしています。このHP見た皆さんも少しでも運動するように心がけましょう!
最後までお読みくださりありがとうございました。