深層強化学習で自律移動走行
2020年11月19日
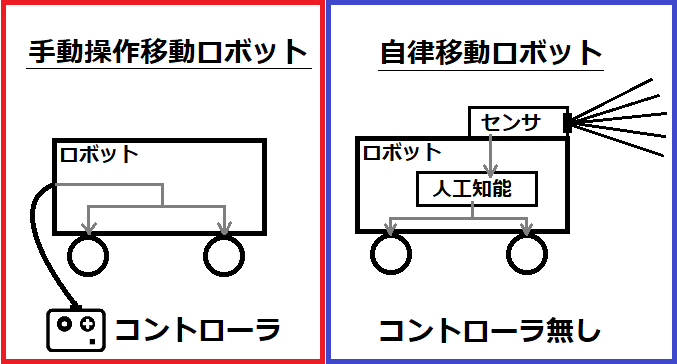
はじめまして、大学院1年の土屋です。 今回の記事では私の研究内容について簡単に書いていきます。研究内容はタイトルにある通り深層強化学習によって自律移動ロボットを走行させることです。簡単に言うと、人が直接ロボットを操作することなくロボット自身が障害物を避けながら目的地に向かって走行をするようにするという研究です。この人工知能を深層強化学習という手法を用いて作成します。
結果
現在も研究中ですが、途中結果として校舎の中で目標地点を決めて自律移動させたときのロボット移動軌跡が画像の様になりました。スタート地点が青色の丸、目標地点が赤色の丸、緑の線を走行軌跡となります。実際には地図情報はロボットに与えずに走行し、初期位置に対する目的地の相対位置関係(目的地までの距離と方角)のみを与えています。画像からわかるように、設定した目標地点まで壁を避けながら走行することができました。

今後
今後はロバスト性の高い自己位置推定や、様々な環境への対応可能な学習を行っていこうと考えています。