自作簡易シミュレータに人っぽい障害物を作りました
2021年07月20日
こんにちは。大学院2年生の土屋です。 前回の記事でも少し書いた深層強化学習を使った自律移動ロボットの研究を現在も行っているのですが、特に現在は人などの動く障害物も避けられるようなナビゲーションシステムの研究をしています。
この研究をするために、二次元の簡易シミュレータを開発したのですが人のような障害物をどうやって生成するか検討し調べたところORCA(Optimal Reciprocal Collision Avoidance)という衝突回避アルゴリズムを使って人っぽいものを作れると思い、作ってみました。
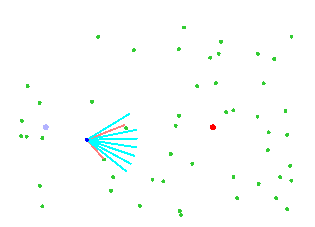
↓自作簡易シミュレータの画面
(緑:ORCAエージェント)
ORCAの実装はRVO2という群衆シミュレーションライブラリを使うことで可能なようなので、これを使って実装しました。 中野キャンパスの11階の環境に相互によけながら動く人っぽい障害物が作成できました。
使用したソフトウェア・ライブラリ
・Python-RVO2 ・OpenAI Gym※シミュレータの基礎部分をGymで作成