行動モデルの選択による移動ロボットの自律走行
2021年09月20日

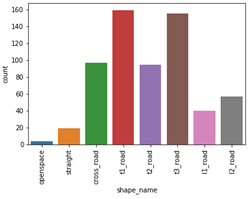
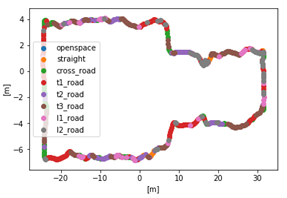
ホームページをご覧くださりありがとうございます。森岡研究室4年生の湯浅です。 今回は、現在研究として取り組んでいることを軽く触れていきたいを思います。 こちらの続きになるのですが、文章がとても分かりにくいです笑 走行システムについて軽く説明すると、予め十字路やT字路のような基本形状にて行動学習をしておき行動モデルを作成しておきます。そして、ロボットが走行中にどの基本形状を走行しているかを即時に分類し、その形状の行動モデルに切り替えて走行するというものになっています。 今回、サムネイルにもある明治大学中野キャンパス11Fにて走行実験を行いました。当時は一周することが難しかったが、行動モデルを作り直したり、waypointを細かくすることで上手く走行することができました。下の図が走行経路と行動モデルの選択頻度の図になるのですが、うまく選択できているかあまりわかりません笑
 まだまだ未熟ですのでもっと理解力を深め、詳しく説明できるように頑張ります。今回はホームページをご覧くださりありがとうございました。拙い文章でわかりにくかったと思いますが、また次回があればよろしくお願いいたします。
まだまだ未熟ですのでもっと理解力を深め、詳しく説明できるように頑張ります。今回はホームページをご覧くださりありがとうございました。拙い文章でわかりにくかったと思いますが、また次回があればよろしくお願いいたします。