RSJ2021で発表してきました
2021年09月27日

こんにちは。大学院2年生の土屋です。 以前の記事でも紹介している私の研究がある程度結果が出たのでRSJ2021(第39回日本ロボット学会学術講演会)で研究発表をしてきました。今回はその発表の内容について簡単に説明していきます。
研究目的
ロボットが未知の環境で、人などの動的障害物との衝突を回避しながら目的地まで自律走行することを目的としています。
研究内容
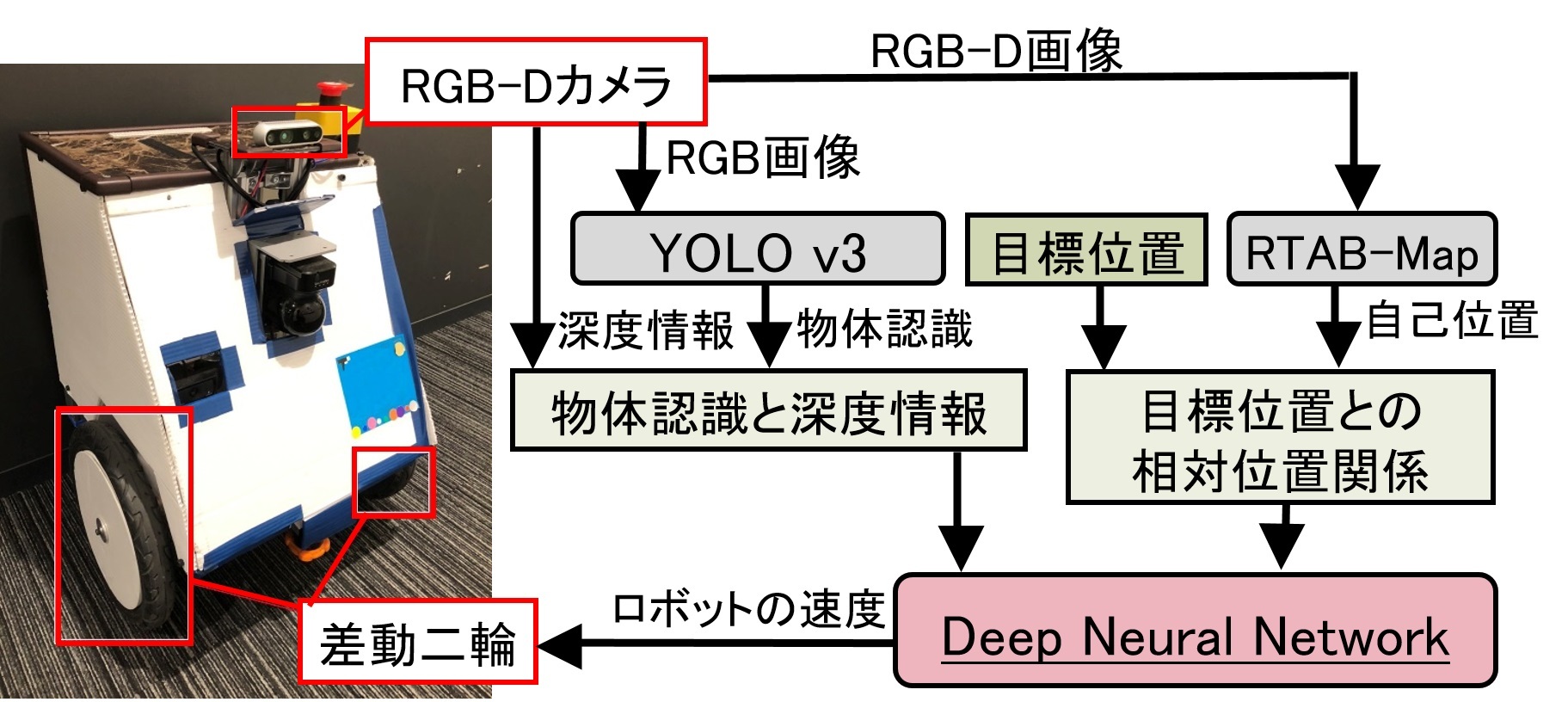
ロボットにはRGB-Dカメラを搭載し、RGB-Dカメラからの情報だけで人を避けながら目的地まで走行する車輪の回転速度を常に算出し続けるようなシステムの開発を行いました。具体的にはRGB-Dカメラからの情報から周囲の人などの距離、自己位置、壁などの障害物の距離を基にその時のとるべき走行速度を出力するような深層強化学習モデルを作成し、目的達成を試みました。実機における簡単なシステム図を以下に示します。
モデルの強化学習
深層強化学習にはDDPGアルゴリズムを用いて、モデルの訓練は作成したシミュレータを用いて行います。シミュレータ内の人の動き方などは前回の記事で書いたようにORCAで動かしつつ学習を行いました。深層強化学習は、学習パラメータ、ネットワークの層の数、学習環境、報酬の与え方などを色々いじりながら学習した結果、ある程度精度のあるモデルを作ることができました。以下は学習済みモデルを使ってシミュレータ内で走行させた様子です。
 青:ロボット 緑:人 赤:目的地
青:ロボット 緑:人 赤:目的地
上記からもわかるように、人との衝突を回避しながら目的地まで走行することが確認できました。
結果
人を認識した上で学習を行うことで、人との衝突回避行動を学習できたのでないかと思われます。
今後
今後は実際に実機に本システムを搭載し、走行させようと思っています。現状RGB-Dカメラ情報のみで自己位置推定を行っているため、ホイールオドメトリも活用することで自己位置の信頼性と安定性を向上させようと思います。