Unity内での自律走行
2022年05月17日
こんにちは、M2になりましたの柴田です。 moriokalabの記事をいつも楽しみに待ってくださっているそこのあなた、今日初めて見たよって言うそこのあなたも、皆様のおかげで成り立っています。ありがとうございます。
そんな人いるかって? 照れないでください、あなたのことです。
さて、moriokalabの記事も色とりどりになってきましたが、最近のトレンドの一つがUnityです。 みんな、秋葉原の街中を走ってみたり、環境構築してみたり、VTC Unityを使ってみたりしています。 今回は意外と説明していなかったUnity内での自律走行についてのお話です。
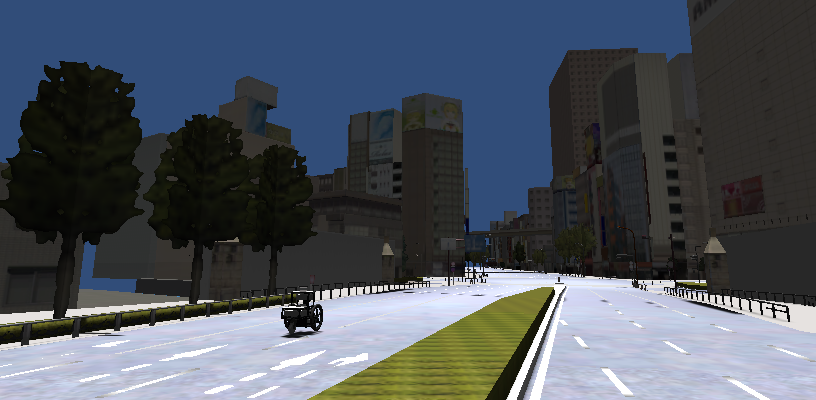
例のごとく、ロボットはVTC Unityのこちらを使わせていただきます。センサモデルはRosSharpで実装されているものを使います。
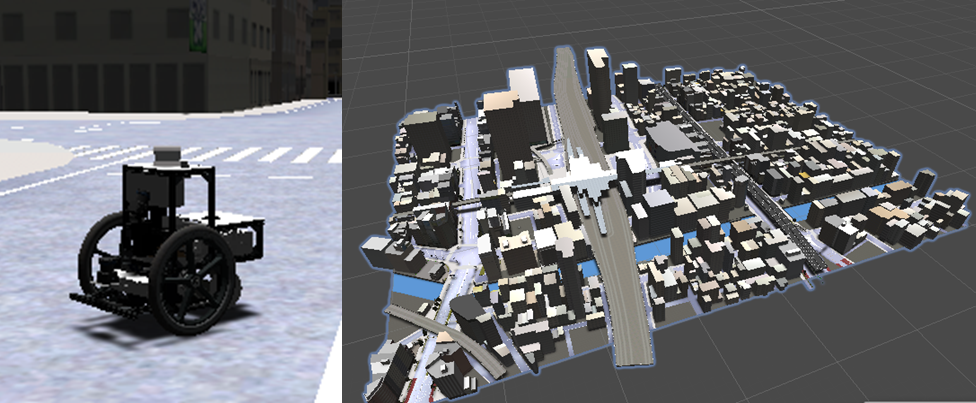
Unity内と言ってもやることはいつもと同じ、今回はmove_baseを使うので、地図を作成していきます。
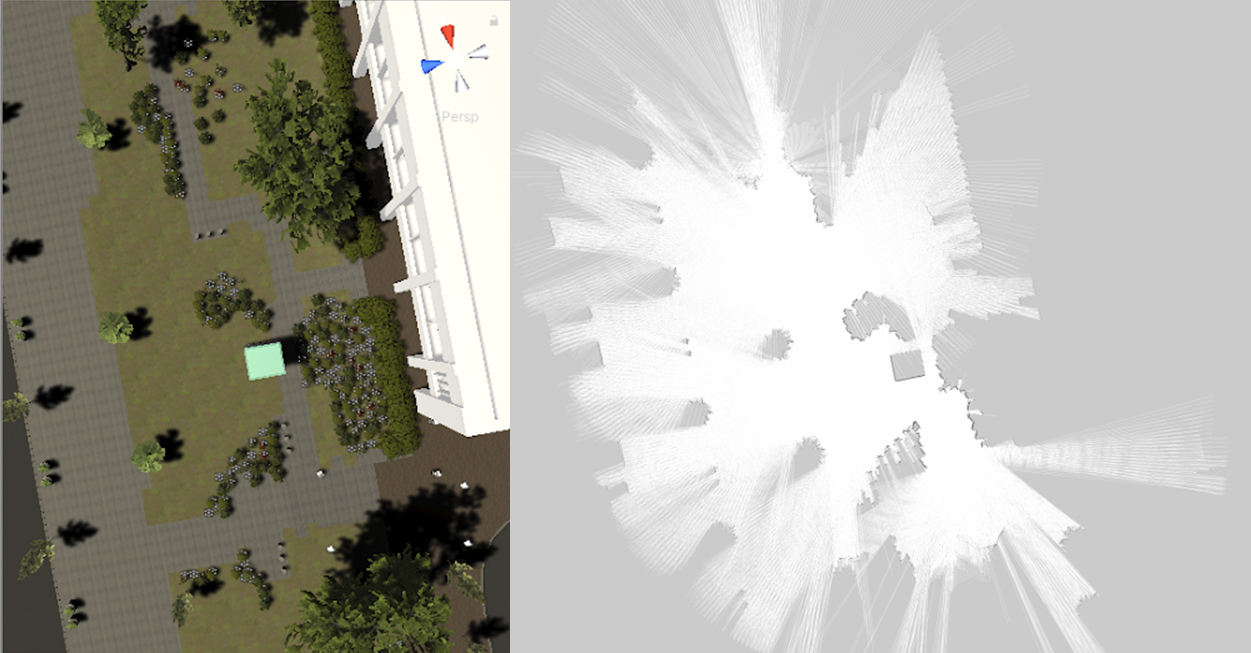
秋葉原の環境とその地図。直方体で表現された建物が並んでいる様子がセンシングできています。
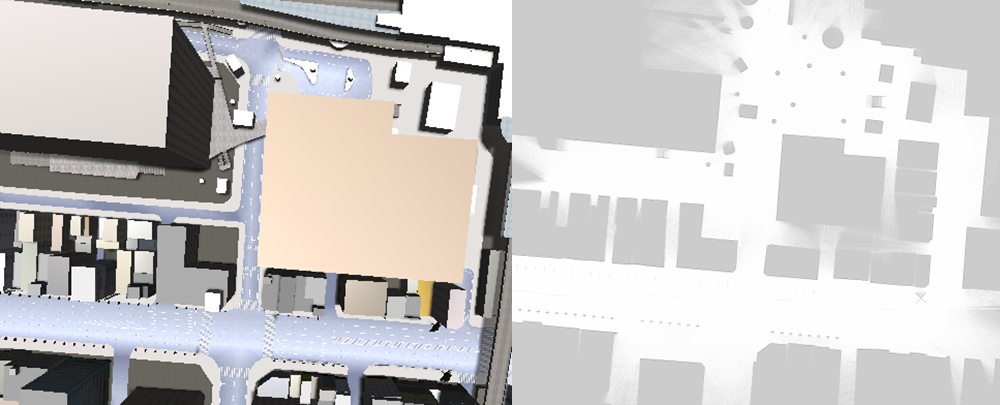 VTC内のつくば市役所前の地図。
VTC内のつくば市役所前の地図。
葉っぱや建物のオブジェクトの作りこみ具合によって地図の様子もだいぶ変わりますね、 Unity内のオブジェクトをそのまま作画しているだけなので,当たり前なのですが、
地図ができたら自律走行をします。

この辺りまでやってようやく、それぞれの研究につながってきますが、今回はこの辺で。