2019年度の3年ゼミの活動
2019年10月28日
教員の森岡です。来月から2年生向けの研究室見学があるので、参考資料として今年度の3年生の活動をまとめておきます。
恵比寿の焼肉屋にて懇親会。卵をつけて食べる薄い肉が絶品。 過去の記事:3年生懇親会
春学期の前半はC言語プログラミングを学習しました。主に2年までの授業で取り扱っていたprocessingの知識を使って、その他の言語にも対応できることを学びました。ロボットシステムの開発ではLinuxを使うことが多いので、そのトレーニングにもなりました。 過去の記事:三年生の中間レポート
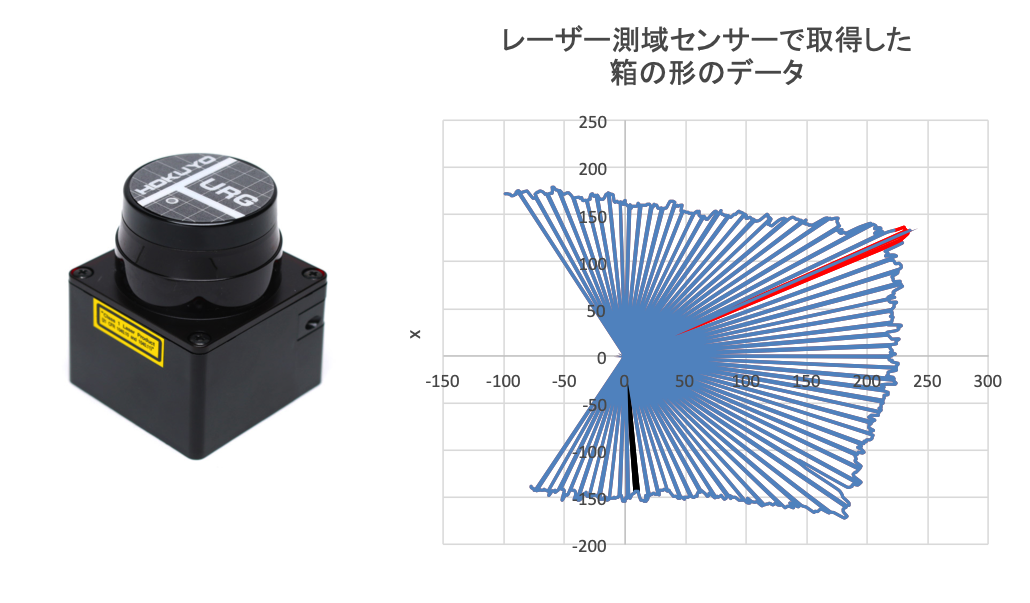
春学期の後半は、ロボットやセンサーなど実際のハードウェアを使用したり画像処理をするプログラミング作成に取り組みました。過去の記事に紹介するように、距離画像センサー(Kinect)を使って一定距離にある物体を抽出したり、市販の移動ロボットを制御するプログラムを作成しました。その他にも、自動運転車にも搭載されるレーザー測域センサー(LiDAR)で周囲にある物体の形状を測定したり、画像処理ライブラリOpenCVを使って物体を検出するプログラムを作成しました。ゼミではデモンストレーションを交えてプレゼンをしました。
過去の記事:KINECTを使用した実習
過去の記事:ロボットを使用した実習
夏休み中はゼミはないですが、学生の希望に応じて機械学習やロボットシステム、画像認識に関する書籍を使って自学しました。ロボットシステムを開発するためのプラットフォームとして広く使われているROSや、pythonプログラミングなどを通じて今風の画像認識や強化学習といった機械学習を学びました。 過去の記事:OSではないOperating System
秋学期になり、卒業研究のテーマや方向性を決めました。ロボットに関するテーマが多いですが、電動キックボードのような新たなモビリティについても考えています。これからはこのテーマの達成を目指して本格的な卒業研究を進めていきます。進展状況によっては、3年までの成果を4年のはじめに学会で発表することも目指します。
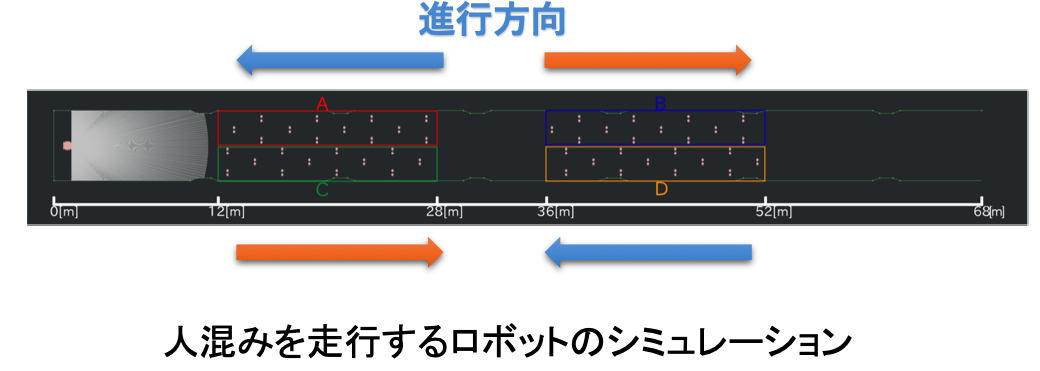
・最新の深層強化学習の手法を導入した移動ロボットの走行性能と学習速度の向上 ・Googleマップなどの既存の電子地図を用いた移動ロボットの行動学習用地図の自動生成 ・敵対的生成ネットワークを用いた行動学習用地図の自動生成と移動ロボットの行動学習 ・画像による識別に基づいた環境に適応的な学習モデルを使った移動ロボットの自律走行 ・センサデータ、学習データに価値を与えるブロックチェーンを使ったロボットネットワーク ・深層強化学習により人混み走行可能な人間支援ロボットの開発 ・スマホとロボットをペアリングして操作するためのアプリの開発 ・電動キックボードの安全走行のためのセンシングおよび制御